
Ardupilot mega (apm 2.5) автопилот
Краткое руководство

Добро пожаловать в руководство по ArduPlane. Тут вы найдете, как превратить любой радиоуправляемый самолет в полностью автономный БПЛА! Просто добавьте ArduPilot Mega автопилот, чтобы любой радиоуправляемый самолет преаратился в полностью программируемый летающий робот с наземной станцией под управлением мощной программы планировщик миссий.
Следуйте за элементами меню слева.
ArduPilot Mega (APM 2.5) автопилот
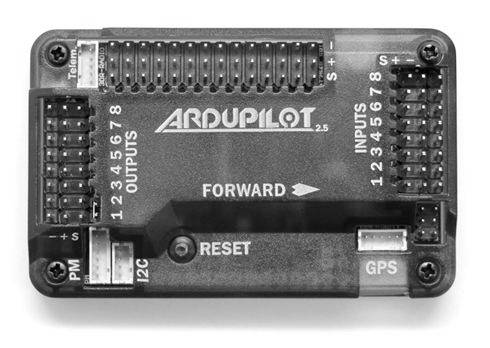
ArduPilotMega 2.5 (APM 2.5) один из самых продвинутых, основанных на IMU (инерционное измерительное устройство) автопилотов с открытым исходным кодом (по невероятно низкой цене $179)
Особенности:
- Бесплатное программное обеспечение устанавливается в различных версиях, которое поддерживают самолеты (ArduPlane), мультикоптеры (QUAID, HEX, OCT, и т.д.) и классические вертолеты (ArduCopter), и автомодели (ArduRover)!
- Простой процесс установки и загрузки прошивки через программу Планировщик миссий. Программирования не требуется! (Но если вы захотите переписать код, то можете это легко сделать с инструментарием программирования Arduino)
- Полноценное визуальное планирование маршрута
- Поддержка сотен 3D точек
- Возврат к точке старта, удержание позиции, режим следуй за мной или просто нажмите на карту и скажите ему идти сюда (это возможно с телеметрией)
- Автоматический взлет и посадка
- Двусторонняя телеметрия и команды в полете, используя универсальный и мощный протокол MAVLink
- Бесплатное программное обеспечение наземной станции, в том числе программа APM Mission Planner, которая включает в себя планирование миссий, изменение параметров на лету(в прямом смысле), дисплей-табло полета, голосовое озвучивание событий, и полная регистрации данных с возможностью воспроизведения.
- Кросс-платформенность. Поддерживаются операционные системы Windows, Mac и Linux. Используйте графическую утилиту установки APM Mission Planner в Windows (работает под Parallels на Mac или Mono на Linux) или используйте интерфейс командной строки на любой другой операционной системе. Наземные станции доступны для всех трех операционных систем. Возможность персонализировать прошивку под свои нужды на основе среды программирования Arduino, которая также является полностью кросс-платформенной.
- специальные команды, действия, такие как управление видео и фото камерой
- Поддержка полной схемы взаимодействия программно-аппаратно-цикла с симуляторами XPlane и Flight Gear
- Оборудование включает в себя следующее:
- 3-осевой гироскоп
- 3-осевой акселерометр
- 3-осевой компас
- Датчик атмосферного давления для определения высоты
- GPS модуль с интенсивностью обновления данных 5 раз в секунду
- Датчик напряжения для определения состояния батареи
- 4 Мб встроенной памяти регистрации данных (черный ящик). Миссии будут автоматически записаны в энергонезависимую память и могут быть впоследствии экспортированы в KML
- Встроенный аппаратный процессор отказоустойчивости, может вернуть модель к точку старта при потере сигнала радиоуправления.
- (Опционально) Датчик воздушной скорости полета
- (По желанию) датчик тока
Предостережения
Когда-нибудь автопилоты станут устройствами включил и полетел как те игрушки, которые вы можете купить в супермаркете, но не сейчас. Все планеры разные, и, как проект с открытым кодом, мы стараемся поддерживать широкий спектр аппаратных опций, это означает, что вы должны настроить автопилот, прежде чем вы отправить модель в полет.
Хотя APM работает из коробки на большинстве стандартных самолета RC, от простейших! EasyStars к высокоскоростному Funjets, вам может потребоваться настроить его немного, если у вас есть что-то необычное (очень маленькие или необычного конфигурации, таких как модели с V-образным хвостом). Мы стараемся сделать также просто.
И если у вас есть сомнения, то следует сначала попробовать полетать в симуляторе перед вылетом в реальной жизни!
Статьи к прочтению:
- Аргументы тригонометрических функций задаются в радианах. аргумент заключается в скобки}.
- Архитектура информационной системы
Flite Test — ArduPilot Mega 2.5 — Review
Похожие статьи:
-
Классификация программного обеспечения. накопители cd или dvd дисков
Накопители CD или DVD дисков В настоящее время наиболее привлекательны пишущее мультиформатные DVD-ROM, которые могут не только читать CD и DVD, но и…
-
Угрозы безопасности информации и их классификация
Угрозы безопасности информации бывают следующие: Угроза удаленного администрирования. Под удаленным администрированием понимается несанкционированное…