
Цель работы: изучение принципов импульсно-кодовой модуляции
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Как вам известно, цифровые системы передачи данных неуклонно вытесняют аналоговые системы с рынка услуг связи. Особенно отчетливо это проявляется в области телекоммуникаций. Следовательно, понимание принципов цифровой связи чрезвычайно важно для специалистов в области телекоммуникаций.
Импульсно-кодовая модуляция (ИКМ) широко используется в системах передачи данных для преобразования аналоговых сообщений (например, речи) в последовательный поток нулей и единиц. Процесс преобразования называется кодированием (encoding), и в простейшем случае состоит из следующих операций:
- Равномерная во времени дискретизация аналогового сигнала с помощью устройства выборки и хранения
- Сравнение каждого отсчета с набором опорных напряжений – уровнями квантования
- Нахождение уровня квантования, наиболее близкого к уровню дискретизированного сигнала
- Формирование двоичного числа, соответствующего найденному уровню квантования
- Вывод двоичного числа в последовательном формате (бит за битом)
- Повторение приведенных выше шагов для следующего отсчета и т.д.
Важной характеристикой ИКМ является разность между значением дискретизированного напряжения (выборки) и уровнями квантования, с которыми оно сравнивается. Чаще всего входные напряжения не будут совпадать с уровнями квантования. Как упоминалось выше, ИКМ кодер присваивает выборке значение ближайшего уровня квантования. При этом квантованное значение выборки отличается от действительного, а разность между ними называется ошибкой квантования. Она проявляется в ИКМ демодуляторе приемника, где уровень исходного сигнала уже неизвестен. Значение погрешности зависит от количества уровней квантования. Очевидно, что чем больше количество уровней квантования при заданном диапазоне изменения уровня передаваемого сигнала, тем меньше погрешность.
Другой важной характеристикой ИКМ систем является тактовая частота кодера, определяющая частоту дискретизации. Во избежание наложения спектров эта частота должна быть как минимум в два раз больше верхней частоты спектра передаваемого сообщения (или, если сообщение состоит из нескольких частот, как минимум в два раза больше самой высокой частоты). Влияние наложения спектров (aliasing — алиазинг) на выход ИКМ-системы оставляется на рассмотрение в эксперименте по декодированию ИКМ-сигнала.
Краткие сведения о модуле PCM ENCODER (ИКМ кодер) системы Emona FOTEx
Модуль PCM Encoder выполнен на основе интегральной микросхемы, реализующей функции ИКМ кодера и ИКМ декодера. Микросхема, называемая кодек (codec), предназначена для преобразования аналоговых напряжений в диапазоне от -2.5 В до +2.5 В в 7-разрядное двоичное число, которое обеспечивает 128 уровней квантования, каждому из которых соответствует одно из 128 двоичных чисел в диапазоне от 0000000 до 1111111.
Каждое двоичное число передается в последовательном формате в виде 8-битного кадра (frame). Вначале передается старший значащий бит (бит 7), затем передается 6-ой бит и т.д., в конце передается младший значащий бит (бит 1). Бит 0 – это бит кадровой синхронизации, который используется модулем PCM Encoder для нахождения начала кадра. Он просто изменяется между 0 и 1 в соседних кадрах. Как именно он используется для кадровой синхронизации при декодировании, объяснено далее в эксперименте по ИКМ декодированию.
Модуль PCM Encoder формирует на отдельном выходе сигнал кадровой синхронизации Frame Synchronisation (FS), который переходит на высокий уровень, как только на выходе появляется бит кадровой синхронизации. Сигнал кадровой синхронизации FS не нужен при декодировании и используется в модуле FOTEx только как сигнал внешнего запуска осциллографа при наблюдении ИКМ сигналов.
На рис. 1 приведен пример потока данных (PCM) с выхода ИКМ кодера, состоящего из трех кадров (Frame1, Frame2, Frame3), вместе с сигналами битовой (Clock) и кадровой (FS) синхронизации. Биты PCM с 7 по 1 изображены в виде прямоугольников, которые показывают, что каждый из них может быть в одном из двух состояний: „0? или „1?, в зависимости от значения входного аналогового сигнала.
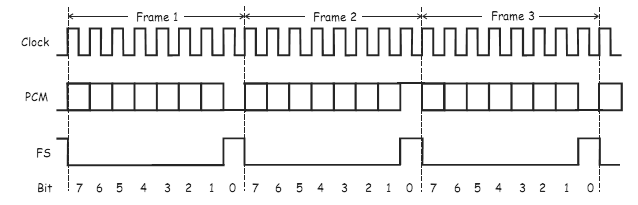
Рисунок 1
С помощью модуля PCM Encoder нужно будет выполнить импульсно-кодовую модуляцию (ИКМ кодирование) следующих сигналов: постоянного напряжения с фиксированным уровнем, постоянного напряжения с регулируемым уровнем, непрерывно изменяющегося сигнала. Вам предстоит также проверить работоспособность ИКМ кодера.
Оборудование:
- Персональный компьютер с соответствующим установленным программным обеспечением
- NI ELVIS II с USB-кабелем и блоком питания
- Модуль расширения Emona FOTEx для выполнения экспериментов
- Два проводника с разъ?мами BNC — банан (2 мм)
- Набор соединительных проводников с разъ?мами типа банан (2 мм)
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ:
Часть A – Введение в ИКМ-кодирование, на входе статический сигнал постоянного тока
1. Убедитесь, что питание NI ELVIS II выключено, выключатель расположен на задней стенке устройства.
2. Осторожно вставьте модуль расширения Emona FOTEx в NI ELVIS II.
3. Вставьте крепежные винты для фиксации модуля Emona FOTEx в NI ELVIS II.
Примечание 1: Это может быть уже сделано. Если нет, то винты входят в комплект с NI ELVIS II и вставляются в отверстия в верхних правом и левом углах FOTEx.
Примечание 2: Для предотвращения повреждения FOTEx эти действия должны выполняться при выключенном питании.
4. Подключите NI ELVIS II к ПК при помощи кабеля USB.
5. Включите питание NI ELVIS II (выключатель расположен на задней стенке устройства), затем включите питание макетной платы, этот выключатель расположен в правом верхнем углу рядом с индикатором питания.
6. Включите компьютер и дайте ему загрузиться.
7. Запустите программу NI ELVISmx.
8. Установите переключатель Mode (режим) модуля PCM Encoder в положение PCM.
9. Соберите схему, показанную на рис. 2
Примечание 1: Вставьте черный штекер кабеля осциллографа в гнездо GND (заземление)
Примечание 2: Вход INPUT 1 модуля PCM Encoder можно подключить в любому свободному гнезду GND.
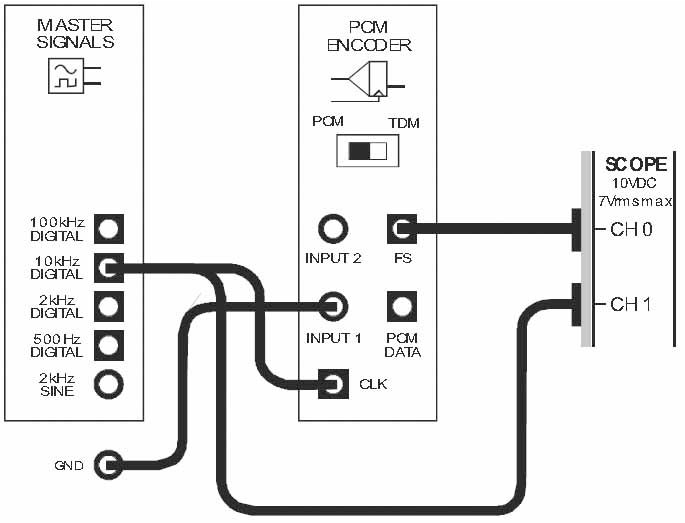
Рисунок 2
Выполненные соединения можно представить блок-схемой, изображенной на рис. 3. Синхронизация ИКМ кодера (PCM Encoder) осуществляется сигналом 10 kHz DIGITAL с выхода генератора опорных сигналов (Master Signals). На аналоговый вход кодера подается постоянное напряжение 0 В.
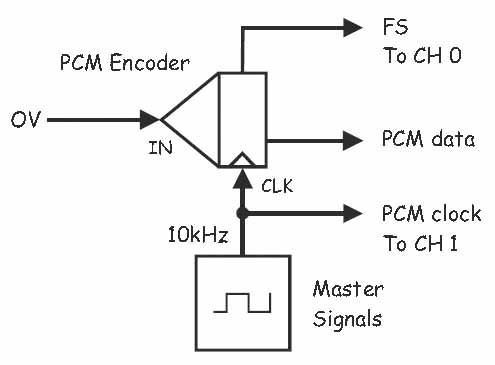
Рисунок 3
PCM Encoder – ИКМ кодер, IN – вход сигнала сообщения, CLK – вход синхронизации,
Master Signals – генератор опорных сигналов, FS To CH 0 – сигнал кадровой синхронизации к каналу 0, PCM data – ИКМ закодированное сообщение, PCM clock To CH 1 – синхроимпульсы ИКМ к каналу 1
10. Запустите программу (VI) Oscilloscope NI ELVIS II (Осциллограф).
11. Настройте осциллограф так же, как в работе 1 с учетом следующих изменений:
- Scale (Масштаб по напряжению) обоих каналов – 2 В/дел. вместо 1 В/дел.
- Coupling (Связь с источником сигнала) обоих каналов – DC (открытый вход) вместо AC (закрытый вход)
- Trigger Level (Уровень напряжения запуска) – 2 В вместо 0 В.
- Timebase (Масштаб по оси времени) – 200 мкс/дел. вместо 500 мкс/дел.
 12. Установите управляющий элемент Slope (Наклон) в положение (отрицательный).
12. Установите управляющий элемент Slope (Наклон) в положение (отрицательный).
Выбор режима запуска по отрицательному фронту означает, что развертка осциллографа запускается, когда сигнал кадровой синхронизации FS изменяется c высокого уровня на низкий. Отличие режима запуска по отрицательному фронту от режима запуска по положительному фронту можно заметить, изменяя положение управляющего элемента Slope. Не забудьте убедиться в том, что после этих манипуляций снова установлен запуск по отрицательному фронту.
Рисунок 4
Примечание 1: Импульс кадровой синхронизации (FS) должен занимать одно деление по горизонтали (рис. 4). При необходимости подстройте частоту выходного сигнала функционального генератора.
Примечание 2: При таких настройках каждый бит последовательных данных занимает одно деление по горизонтальной оси.
14. Включите канал 1 осциллографа (поставив флажок в окне Channel 1 Enabled) для наблюдения сигналов битовой (CLK) и кадровой (FS) синхронизации.
Настройте осциллограф так, чтобы осциллограммы не перекрывались. Для этого необходимо установить управляющий элемент Vertical Position (отклонение по вертикали) канала 0 в положение 2В, а канала 1 в положение -5 В.
15. Нарисуйте полученные осциллограммы сигналов с соблюдением масштаба на поле, отведенного под графики (приведено ниже), оставив свободное место для третьего сигнала.
Рисуйте сигнал битовой синхронизации (CLK) в верхней трети листа, а тактовой синхронизации (FS) посередине.
16. Подключите канал 1 осциллографа к выходу модуля PCM Encoder (ИКМ кодер), как показано на рис. 5.
Внимание! пунктирной линией показаны соединения, которые уже есть.
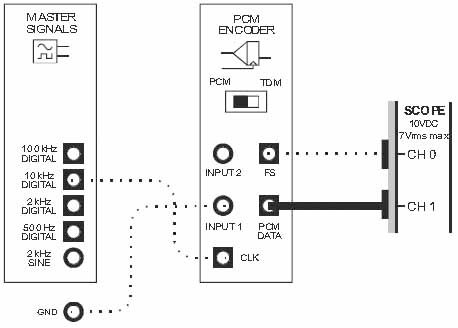
Рисунок 5
Выполненные соединения можно представить блок-схемой, изображенной на рис. 6. Канал 1 должен показывать 10 бит данных, поступающих с выхода ИКМ кодера. Первые 8 бит слева относятся к первому кадру сообщения, а оставшиеся 2 бита – к следующему.
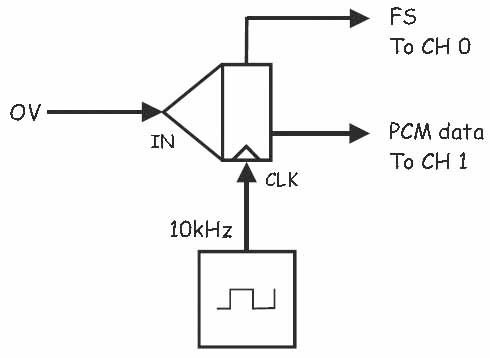
Рисунок 6
IN – вход сигнала сообщения, CLK – вход синхронизации, FS To CH 0 – бит кадровой синхронизации к каналу 0, PCM data To CH 1 – ИКМ закодированное сообщение к каналу 1
17. Нарисуйте полученную осциллограмму сигнала с соблюдением масштаба на оставленном свободном месте поля, отведенного под графики.
Часть B – ИКМ-кодирование постоянного напряжения с изменяемым уровнем
Ранее с помощью ИКМ кодера вы преобразовывали постоянное напряжение (0 В) в ИКМ сигнал. При выполнении последующих действий вы увидите, что происходит при ИКМ кодировании постоянного напряжения, уровень которого изменяется.
18. Запустите виртуальный прибор Emona VarDC (источник регулируемых напряжений).
Примечание: Виртуальный прибор Emona VarDC использует аппаратные средства NI ELVIS II, чтобы подать регулируемое биполярное постоянное напряжение на выход DAC0 модуля FOTEx.
19. Проконсультируйтесь у преподавателя, подходит ли присвоенный по умолчанию в программе Emona VarDC VI номер устройства текущим настройкам ПК.
20. Установите выход Emona VarDC на 0 В.
21. Отключите проводник от гнезда заземления.
22. Внесите изменения в схему, как показано на рисунке 7.
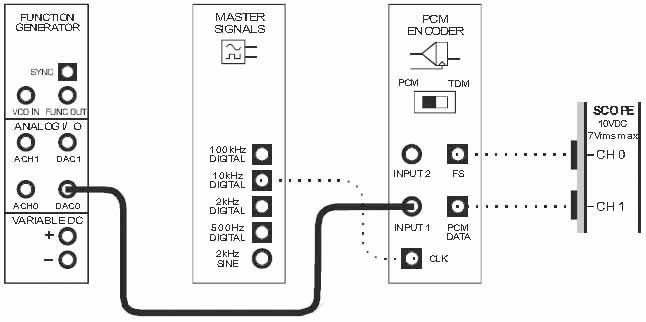
Рисунок 7
Выполненные соединения можно представить блок-схемой, изображенной на рисунке 8. Программа Emona VarDC VI используется для изменения постоянного напряжения на входе ИКМ кодера.
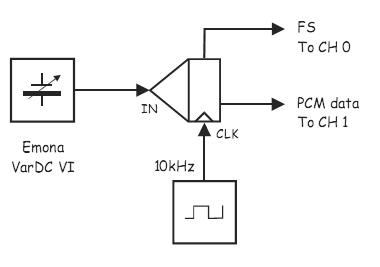
Рисунок 8
23. Определите значение 7-битного двоичного кода на выходе ИКМ кодера.
Совет 1: Первые восемь отметок по горизонтали на экране осциллографа соответствуют первому кадру выходного сигнала ИКМ кодера.
Совет 2: Помните, что бит 0 – это бит синхронизации кадра.
Примечание: Вы должны заметить, что двоичное число, соответствующее выходному сигналу ИКМ кодера, достаточно близко к коду, полученному вами ранее, когда вход модуля был закорочен на землю.
24. В виртуальном приборе Emona VarDC VI плавно увеличивайте уровень выходного отрицательного напряжения, одновременно наблюдая за тем, как изменяется двоичный код на выходе ИКМ кодера.
25. Определите уровень отрицательного напряжения, при котором на выходе ИКМ кодера впервые появляется двоичный код 00000000.
26. Запишите полученное напряжение в таблицу 1.
Таблица 1
| Код на выходе ИКМ кодера | Напряжение на входе ИКМ кодера |
27. Верните напряжение на выходе Emona VarDC на 0 В.
28. В виртуальном приборе Emona VarDC VI плавно увеличивайте уровень положительного напряжения, одновременно наблюдая за тем, что происходит с двоичным кодом на выходе ИКМ кодера.
Раздел C – ИКМ кодирование непрерывно изменяющихся напряжений
Теперь рассмотрим, как работает ИКМ кодер при преобразовании непрерывно изменяющегося сигнала, например, синусоидального.
31. Закройте ВП VarDC.
32. Отсоедините штекеры от выхода DAC0.
33. Внесите изменения в схему согласно рис. 9.
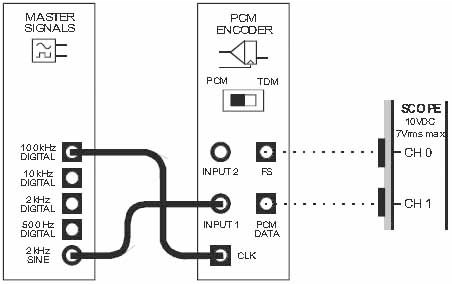
Рисунок 9
Выполненные соединения можно представить блок-схемой, изображенной на рисунке Виртуальный прибор VarDC заменен сигналом с выхода 2kHz SINE генератора опорных сигналов, чтобы смоделировать постоянно изменяющееся сообщение.
Обратите внимание, что частота битовой синхронизации увеличилась до 100 кГц. Это было сделано, чтобы избежать проблемы наложения спектров (aliasing), упомянутой в предварительном обсуждении. Не вдаваясь в подробности, лишь отметим, что наложение происходит, когда частота дискретизации меньше, чем удвоенная частота сообщения. Тактовая частота в 10 кГц дает частоту дискретизации в 1250 отсчетов в секунду, что намного ниже минимальной частоты дискретизации 4000 Отсчетов/с, требуемой для сообщения с частотой 2 кГц. При тактовой частоте 100 кГц мы получаем частоту дискретизации 12500 Отсчетов/с, что вполне укладывается в минимальные требования.
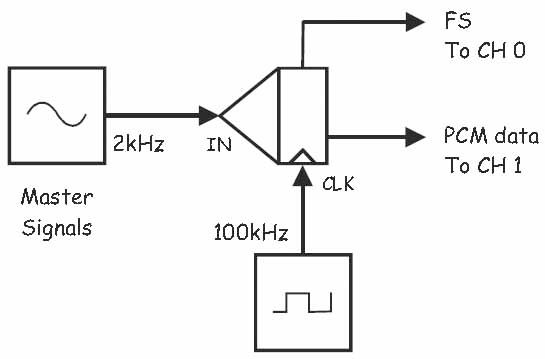
Рис. 10
Master Signals – генератор опорных сигналов, IN – вход сигнала сообщения, CLK – вход синхронизации, FS To CH 0 – бит кадровой синхронизации к каналу 0,
PCM data To CH 1 – ИКМ закодированное сообщение к каналу 1
48. Наблюдайте на экране осциллографа выходной сигнал ИКМ кодера.
Лабораторная работа № 4
ДЕМОДУЛЯЦИЯ ИКМ СИГНАЛОВ
Статьи к прочтению:
- Цель работы: научиться работать в локальной компьютерной сети.
- Цель работы: получить навыки при работе с макросами вms excel
Исследование системы связи с импульсно-кодовой модуляцией
Похожие статьи:
-
Цель работы: изучение принципов демодуляции икм сигналов
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ При выполнении предыдущего эксперимента вы изучали импульсно-кодовую модуляцию (ИКМ), представляющую собой преобразование исходного…
-
В осциллографе исследуемый электрический сигнал подается через канал вертикального отклонения на вертикально отклоняющую систему ЭЛТ, а горизонтальное…