
Источники ошибок в измерении
Важный вопрос, возникающий при проектировании измерительных приборов или системы измерения, звучит так: Насколько эф/активной окажется измерительная система при измерении переменной величины?
Рассмотрим пример измерения температуры воды из предыдущего раздела. Если преобразователь погружается в жидкость, которая имеет более высокую температуру, чем окружающая среда, тогда преобразователь будет отнимать часть тепла на себя и понижать температуру жидкости. В данном случае
этот эффект, вероятно, будет незначительным, но в других случаях он может оказаться не столь малым. Однако даже в нашем случае возможно, что вследствие установки преобразователя температура
папы, окружающей датчик, окажется ниже, чем в остальной части системы. Такой случай называют агрессивным измерением. Другой пример — измерительный прибор помещается в трубопровод топ-
липа для измерения скорости потока жидкости. Здесь в определенной мере прибор сам будет сдерживать поток. Возвращаясь к предыдущему примеру температурного датчика, также можно предположить, что малый ток, проходящий через преобразователь, создаст эффект нагрева.
Ошибки в измерительной системе отрицательным образом влияют на точность в целом. Ошибки могут быть обусловлены не только вмешательством измерительной системы. Есть много факторов, связанных с показателями совершенства преобразователей и систем измерения. Некоторые из них рассмотрены ниже.
Точность
Это понятие означает степень приближения результата измерения к реальному значению. Точность обычно выражается как максимально допустимая ошибка. Например, если длина в 30 см измеряется обычной деревянной линейкой, ошибка может достигать 1 мм в большую или меньшую сторону. Это расценивается как точность ± 1 мм. Ошибка может быть выражена также в процентах, что в данном случае составляет 0,33%. Для измерителей электрических величин часто указывают максимальную ошибку в процентах от полной шкалы отклонения стрелки. Максимальная ошибка, или точность, зависит опт ряда факторов, поясняемых ниже.
Разрешение
Это «четкость», с которой измерение может быть проведено. Разрешение необходимо отличать от точности. Если бы качественная стальная линейка была сделана по очень высокому стандарту, но (тела градуировку только в сантиметрах, она бы
имела низкое разрешение, даже если градуировка нанесена очень аккуратно.
Гистерезис
Результат измерения зависит от того, насколько полученное значение выше или ниже своего предыдущего значения. Вы можете убедиться в этом, когда будете в следующий раз измерять свой вес
на тех же самых весах. Если вы ступите на весы «нежно», вы будете весить меньше, чем если вы «прыгните» на них (весы зашкалят, а потом установятся равновесии).
Повторяемость
Это плотность размещения показаний, когда снимается несколько подряд идущих измерений точно заданной величины на полном интервале изменения измеряемой переменной величины. Если шкала весов в 5 кг была пройдена увеличением груза от 0 до 5 кг по 1 кг несколько раз подряд, тогда разброс показаний и есть повторяемость. Часто выражается в процентах от полной шкалы.
Сдвиг нуля
Отклонение показаний от нуля при отсутствии измеряемой величины. Стрелочный прибор для измерения электрических величин, как правило, имеет регулировку нулевого положения стрелки.
Линейность
Переходная характеристика преобразователя часто бывает нелинейной (см. характеристику термистора в следующем разделе). Там, где это возможно, преобразователь используют в его линейной
зоне. Показатель нелинейности оценивается как процент от максимальной величины рабочего диапазона.
Чувствительность или масштабный
Коэффициент
Это мера изменения выходного сигнала прибора при заданном изменении сигнала на входе. Чувствительность оценивается на практике как наклон характеристики прибора в линейной зоне. Показатель в 0,1 В/”С, например, означает, что система будет увеличивать свой выходной сигнал на 0,1 В при увеличении температуры на входе на 1 °С.
Время отклика
Это время, требуемое для того, чтобы выходной сигнал системы соответствовал изменению сигнала на входе. Система измерения давления масла в двигателе требует значительно меньшего времени отклика, нежели система измерения уровня
топлива в баке. При измерении, снимаемом до истечения времени отклика, появятся ошибки. Взглянув еще раз на семь этапов измерения, выделим потенциальные источники ошибок:
1. Ошибка агрессивного измерения.
2. Нелинейность преобразователя.
3. Шум на пути передачи сигнала.
4. Ошибки усилителей и других компонентов
измерителя.
5. Ошибки квантования при наличии цифрового
преобразования сигнала.
6. Разрешение индикатора.
7. Ошибка считывания с индикатора.
Для дальнейшего изучения методов и средств измерении есть много хороших учебников. Настоящий раздел имел целью снабдить читателя элементарными знаниями по данному предмету.
Датчики и приводы
Термисторы
Термисторы являются наиболее распространенными приборами, используемыми для измерений температуры двигателя автомобиля. Принцип измерения состоит в том, что изменение температуры вызывает изменение сопротивления термистора и, следовательно, можно получить электрический сигнал, пропорциональный измеряемой величине.
Большинство обычных термисторов — приборы с отрицательным температурным коэффициентом сопротивления (ОТКС). Реальные характеристики термисторов могут быть различными, но типовые значения для термисторов, применяемых в двигателях, будут изменяться от нескольких кОм при 0°С до нескольких сотен Ом при 100 °С. Большое изменение сопротивления при малых изменениях температуры делает термистор идеальным прибором для большинства применений в автоделе. Он также может быть легко протестирован с помощью
простого оборудования.
Термисторы конструируются из полупроводниковых материалов, таких как окись кобальта и никеля. Изменение сопротивления и зависимости от изменения температуры обусловлено тем, что электроны при высоких температурах легко освобождаются от ковалентных связей, это показано на рис. 2.45 (i). Система измерения температуры на основе термистора может быть очень чувствительной за счет значительного изменения сопротивления при относительно малом изменении температуры.
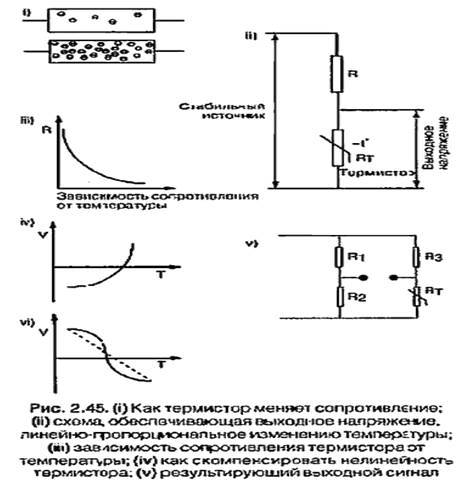
Простая схема, формирующая напряжение пропорциональное температуре, показана на рис. 2.45 (ii).
Отметим, что напряжение источника литания должно быть постоянным, а ток, проходящий через термистор, не должен его заметно нагревать. Эти два фактора могут быть источниками ошибок. Температура типичном термистора будет расти на К С для каждых 1,3 пВт рассеиваемой мощности. На рис. 2.45 (iii) приведен график зависимости сопротивления термистора от его температуры. Основная проблема термистора- нелинейность
указанной зависимости. Используя подходящий мост, можно создать нелинейность, которая в какой- то мере скомпенсирует нелинейность термистора. Такой подход представлен рис. 2.45 (iv).
Также показана комбинация этих зависимостей. Оптимальная линейность достигается тогда, когда средние точки диапазонов температуры термистора и выходного напряжения моста ложатся
на кривую зависимости. На рис. 2.45 (v) приведена схема моста для достижения линейности. Можно подобрать наиболее подходящие значения сопротивления моста R,, R. и R,. Тогда это дает более линейное выходное напряжение, как показано на рис. 2.45 (vi).
Если необходимо, походное напряжение моста можно преобразовать посредством АЦП.
Сопротивление термистора Л, уменьшается нелинейно с температурой в соответствии с отношением:

где Rt —сопротивление термистора. T —абсолютная температура; В — характеристическая температура термистора (типичное значение около 300ft К), А — нормирующая константа термистора.
Для конфигурации показанной мостовой схемы зависимость выходного напряжения определится формулой:

Благодаря выбору подходящих значений сопротивлений резисторов можно получить необходимый диапазон изменения выходного напряжения моста. Это достигается подстановкой известных значении сопротивлении термистора Rt при грех
температурах и решении системы уравнений, например, V0= 0 при О °С, Vа= 0,5 V при 50 °С, V0 =1 при 100 °С.
Термопары
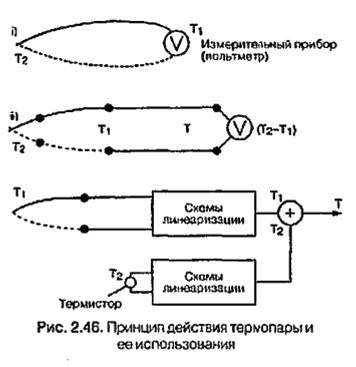
Если различные металлы спаять вместе, наблюдается термоэлектрический эффект, известный как аффект Зесбека. Если «дин из спаев находится при более высокой температуре, чем другой, этот эффект может быть зарегистрирован. На этом принципе основано действие датчика, известного как термопара. На рис. 2.46 показано устройство термопары и соответствующих ей испей. Заметим, что термопара измеряет разность температур (Т 2-
Т,). Чтобы сделать систему измерения более полезной, температуру Тг нужно поддерживать на известном уровне. На нижней части рисунка показана практическая схема, в которой при подключении
спаев к измерителю при одной и той же температуре два напряжения, вырабатываемые спаями, будут вычитаться друг из друга. Схемы компенсации холодного спая могут быть выполнены
так, чтобы компенсировать измерения уровня температуры Тг В таких измерительных схемах часто используют термисторы.
Термопары обычно используют для измерения высоких температур. Термопара из комбинации сплава 70% платины и 30% родия в сочетании со сплавом 94% платины и 6% родия известна как термопара тина В и имеет диапазон применения от 0 до 1500 °С. Область применения этой термопары в автомобиле — измерение температуры выхлопных газов и температуры воздуха наддува.
Индуктивные датчики
Датчики индуктивного типа используются главным образом для измерения скорости и положения вращающихся деталей. Их действие основывается на известном принципе электрической индукции (изменение магнитного потока наводит э.д.с. и катушке). На рис. 2.47 показан принцип действия индуктивного датчика и типичный прибор, применяемый в качестве датчика скорости вращения и положения коленчатого вала двигателя.
Выходное напряжение большинства индуктивных датчиков имеет синусоидальную форму. Амплитуда сигнала зависит от скорости измерения магнитного потока и в основном определяется
оригинальной конструкцией датчика: числом витков в катушке, силой магнита и величиной зазора между датчиком и вращающейся деталью. Как уже отмечалось, выходное напряжение увеличивается с ростом скорости вращения. В большинстве случаев используется частота сигнала. Наиболее часто для преобразования выходного напряжения индуктивного датчика в полезный сигнал его пропускают через триггер Шмидта. Он позволит создать напряжение прямоугольной формы постоянной амплитуды и переменной частоты.

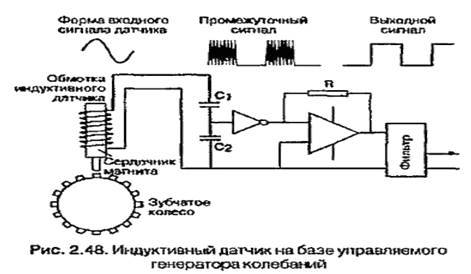
В некоторых случаях выход датчика используется для переключения генератора колебаний о рабочий режим и обратно или же для подавления колебаний. Схема такого варианта показана на рис. 2.48. Генератор создаст колебания высокой частоты порядка 4 МГц, которые далее коммутируются сигналом датчика, а потом фильтруются, что даст на выходе сигнал прямоугольной формы.
Такая схема обладает высокой помехоустойчивостью.
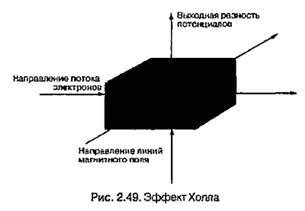
Эффект Холла
Данный эффект был впервые обнаружен доктором Э. Г. Холлом (Dr Е.Н. Mall). Суть его очень проста (см. рис. 2.49): если через кристалл пропустить ток и поместить его в магнитное поле,
перпендикулярное направлению тока, то в нем возникает напряжение.
Амплитуда этого напряжения пропорциональна
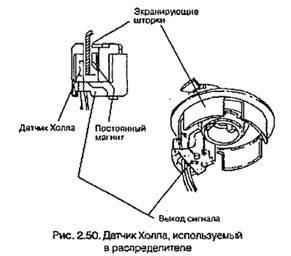
величине тока источника и напряженности магнитного поля. На рис. 2.50 представлен распределитель Боша, принцип действия которого состоит в том, что пластина прерывателя создает
эффект «включения* и «выключения» магнитного поля. Выходной сигнал такого датчика волна почти прямоугольной формы с постоянной амплитудой.
Эффект Холла также может быть использован для обнаружения тока, текущего по кабелю. Магнитное поле, создаваемое вокруг кабеля, пропорционально силе протекающего по нему тока.
 Датчики на базе эффекта Холла становятся все более и более популярными. Частично это обусловлено их надежностью, а также тем, что они непосредственно вырабатывают прямоугольный сигнал постоянной амплитуды в измерителях скорости и создают скачкообразное изменение выходного напряжения в датчиках положения и датчиках тока.
Датчики на базе эффекта Холла становятся все более и более популярными. Частично это обусловлено их надежностью, а также тем, что они непосредственно вырабатывают прямоугольный сигнал постоянной амплитуды в измерителях скорости и создают скачкообразное изменение выходного напряжения в датчиках положения и датчиках тока.
Датчики деформации
На рис. 2.51 показан простой тензометрический датчик вместе с мостовой схемой и усилителем, используемый для преобразования изменения его сопротивления в выходной сигнал. Когда измерительный датчик растягивается, его сопротивление
увеличивается, и когда сжимается — уменьшается. Второй контрольный тензометрический датчик устанавливается не для измерения, а для компенсации температурных изменений. Большинство тензодятчиков состоит из тонкой пленки, которая
наносится на эластичную полоску (обычно бумагу). Она, в свою очередь, размещается в зоне, где предполагается производить измерения.
Чувствительность тензометрического датчика
определяется его «тензофактором»:
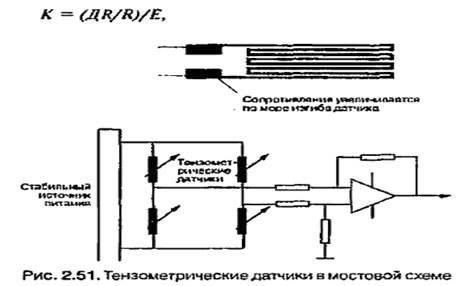
Большинство тензометрических датчиков имеет сопротивление порядка 100 Ом и тензофактор около 2.
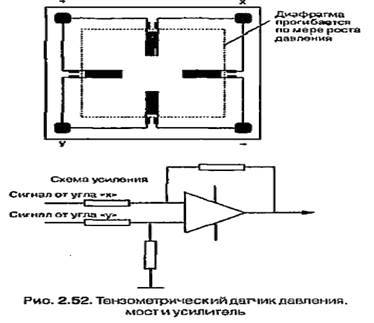
Датчики деформации часто используются для косвенного измерения давления в коллекторе двигателя. На рис. 2.52 показано размещение четырех тензометрических датчиков на диафрагме, образующей часть барокамеры для измерения давления.
Когда в камере происходит изменение давления, датчики обнаруживают деформацию. Выходной сигнал этой схемы формирует дифференциальный усилитель, который должен иметь очень высокое входное сопротивление, чтобы не влиять на баланс
моста. Фактический размер датчика может быть порядка нескольких миллиметром в поперечнике. Температурные изменения показаний скомпенсированы, поскольку все четыре датчика будут подвержены влиянию температуры одинаковым образом, и в результате баланс мостовой схемы останется независимым от температуры.
где К — тензофактор, R — первоначальное сопротивление,
ДR — изменение сопротивления, ?— напряжение деформации (относительное изменении длины ДL/L).
Статьи к прочтению:
- Источник шума; 2-направляющие для сменных звукоизолирующих панелей; 3-микрофон.
- История, предмет, структура информатики
Ошибка молодости (Премьера фильм 2017). Мелодрама @ Русские сериалы
Похожие статьи:
-
Измерение числа ошибок на канальном уровне сети
В сетях Ethernet наиболее распространенными являются следующие типы ошибок: Короткий кадр — кадр длиной менее 64 байт (после 8-байтной преамбулы) с…
-
Измерение электрических величин с применением виртуальных приборов лабораторного комплекса ni elvis
Лабораторная работа № 1 Задание 1.Измерение величины сопротивления, емкости, индуктивности. Определение проводимости диода. Оборудование: набор…