
Масса устройства (без датчиков тока) не более 0,4 кг.
Корпус устройства имеет степень защиты IP-40, крепление – утопленное.
Конструктивно блок БРЗМ1 выполнен в корпусе Uninorm из технической пластмассы. Передняя крышка – прозрачная, на которой нанесены обозначения светодиодов. В задней крышке просверлены отверстия, обеспечивающие доступ к клеммникам.
Трансформатор тока состоит из тороидального сердечника с намотанной на него обмоткой, помещенной в корпус, установленного на кабельном вводе в месте подключения к автоматическому выключателю. При этом каждая жила кабеля пропускается через окно сердечника соответствующего трансформатора. Трансформаторы тока для номинальных первичных токов более 100 А выполняются в одном габарите со следующими параметрами:
-сечение стали – 1 см2;
-внутренний диаметр сердечника – 55 мм;
-число витков обмотки – 8000;
-диаметр провода – 0,14 мм.
Внешний вид и габаритные размеры трансформатора приведены на рис. 6.1.
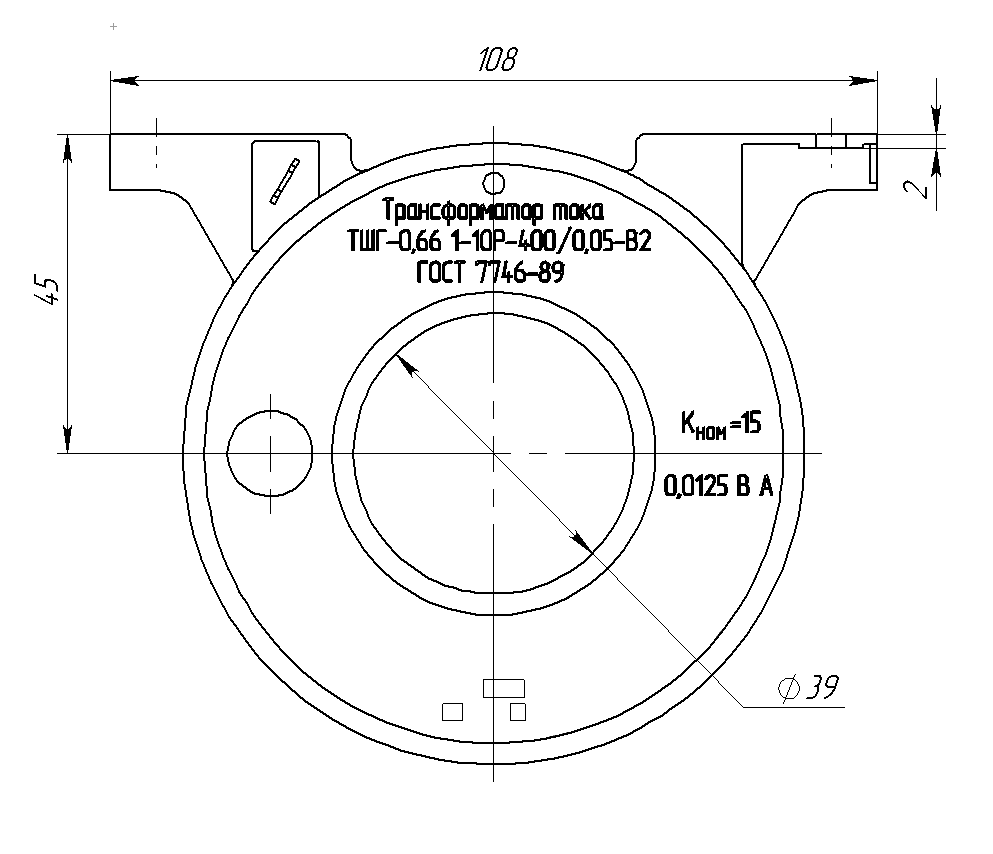
Рис. 6.1. Габаритные размеры трансформатора тока
На рис. 6.2 приведена структурная схема блока БРЗМ1.
В состав блока БРЗМ1 входят датчики тока ДТА, ДТВ, ДТС, предназначенные для гальванического разделения от первичных токовых цепей и снижения уровня токов до требуемых значений по условию минимизации мощности выпрямительных мостов VS1-VS3, нагрузочных резисторов RН1, RН2, RН3.
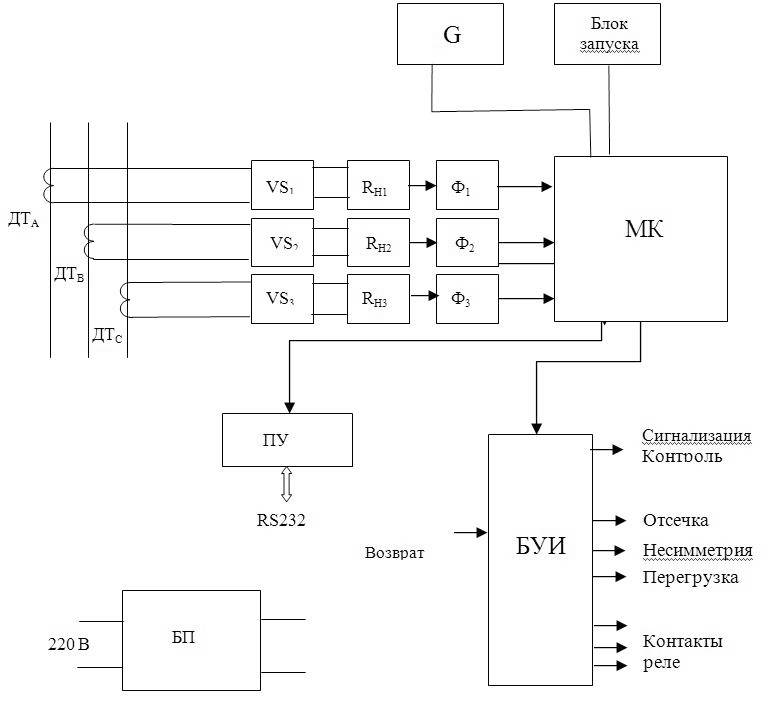
Рис. 6.2. Структурная схема блока БРЗМ1
Напряжения с нагрузочных резисторов, пропорциональные токам фаз, через высокочастотные фильтры Ф1-Ф3 подаются на входы встроенного в микроконтроллер (МК) аналого-цифрового преобразователя (АЦП).
Поскольку АЦП является восьмиразрядным восьмиканальным, а для оцифровки требуется три канала, то для расширения динамического диапазона по токовым входам используется два канала АЦП по каждой фазе (точный, работающий в диапазоне (0 — 2)Iном, и грубый, работающий при кратностях тока более двух).Для обеспечения функционирования микроконтроллера предусмотрен блок запуска, выдающий на МК запускающий импульс при превышении питающего напряжения выше 4,2 В, и генератор (G) тактовой частоты 8 МГц.
Блок управления и сигнализации обеспечивает управление светодиодной индикацией об исправности контроллера («Контроль»), о срабатывании защит («Отсечка», «Несимметрия», «Перегрузка») и управление тремя выходными реле защиты и сигнализации. Возврат защиты осуществляется встроенным под лицевой панелью герконом.
Для программирования контроллера, изменения уставок предусмотрен порт RS-232, требуемый уровень сигналов для которого обеспечивается преобразователем уровня (ПУ). Импульсный блок питания обеспечивает устройство стабилизированным напряжением 5 В.
Микропроцессорные устройства защиты поставляются настроенными на номинальные токи контакторов (IКН) – 160 А, 250 А и 400 А. Для таких номинальных токов устанавливаются датчики тока первого габарита с коэффициентом трансформации КДТ=8000.
Тогда вторичные номинальные токи, поступающие на вход защиты, соответственно будут равны:
I2Н = IКН / КДТ = 160 / 8000 = 20 мА;
I2Н = IКН / КДТ = 250 / 8000 = 31,3 мА;
I2Н = IКН / КДТ = 400 / 8000 = 50 мА.
На вход АЦП поступает напряжение, снимаемое с нагрузочного резистора.
Для контактора с номинальным током 160 А значение сопротивления 10 Ом, для контактора с номинальным током 250 А — 7,67 Ом, для контактора с номинальным током 400 А — 5 Ом.
При этом номинальному току электродвигателя будет соответствовать число 100. Если от контактора получает питание электродвигатель, то в качестве расчетного для защиты следует взять номинальный ток электродвигателя. Для этого в параметры защиты вводится еще один коэффициент К1 = IН/ IКН, равный отношению номинального тока электродвигателя к номинальному току контактора.
Ток срабатывания отсечки задается в процентах от номинального тока контактора IОТС = 1,3 х КП х 100 [%].
Защита от перегрузки предназначена для предотвращения недопустимых термических воздействий на изоляцию электродвигателя. Контроль теплового состояния изоляции может быть осуществлен непосредственно путем встраивания чувствительных полупроводниковых терморезисторов в характерных точках обмотки фаз и косвенно — с использованием информации об уровне и длительности тока перегрузки.
В предлагаемой защите используется косвенный контроль температуры, основанный на математическом моделировании теплового состояния электродвигателя. В качестве величины, отображающей количество тепла, выделяемого в электродвигателе в единицу времени, используется квадрат максимального из трех фаз выпрямленного значения тока. Кроме того, при наложении на режим перегрузки несимметричного режима в электродвигателе дополнительно выделяется определенное количество тепла (в частности — в роторе) от токов обратной последовательности. Для упрощения алгоритма защиты от перегрузки эта составляющая не учитывается, поскольку предусмотрена отдельная защита от несимметричных режимов.
В электродвигателях, работающих в тяжелых условиях пуска, подверженных частым перегрузкам по технологическим причинам, тепловое состояние будет определяться не только степенью перегрузки и ее длительностью, но и предшествующим тепловым состоянием. Поэтому характеристика срабатывания защиты является интегрально зависимой от тока, учитывает предшествующее перегрузке тепловое состояние, процесс остывания обмоток в нормальном режиме работы и при его отключении от сети.
В последнем режиме постоянная времени охлаждения электродвигателя принимается в два раза больше, чем при работающем электродвигателе из-за прекращения вентиляции. Поэтому для более точного учета перегрузочной способности электродвигателя коэффициент интегрирования КИ должен быть легко изменяемым и определяться тепловой характеристикой электродвигателя, приводимой изготовителем.
Статьи к прочтению:
КАК РАБОТАЕТ ДАТЧИК ХОЛЛА [РадиолюбительTV 84]
Похожие статьи:
-
Датчик измерения силы тока ипт-01-300
диапазон рабочих температур: — 45 .. + 60 ° С; предельный измеряемый ток: 300 А (частота 50 Гц). Номенклатура первичных преобразователей, входящих в…
-
Электрические устройства систем управления по степени сжатия воздуха в компрессоре.
Управление панелями клина ВУ производится по программам, приведенным на рис. 5. Рис. 5. Программы регулирования lп = f (?*к ) (1, 2, 3 – номера программ)…