
Общие сведения о системах предупреждения столкновений
Предупреждение столкновений — комплекс действий экипажей и пунктов
управления воздушным движением (УВД), направленный на изменение или сохранение взаимного положения ВС в воздушном пространстве в целях недопущения их опасных сближений и столкновений в воздухе. Изменение взаимного положения ВС осуществляется за счет маневрирования, т.е. преднамеренного изменения направления, высоты или скорости полета.
Различают сигнализаторы опасных сближений и системы предупреждения столкновений (СПС).
Сигнализаторы опасных сближений предназначены для выдачи экипажу
сигналов (звуковых или световых) о возможной угрозе столкновения с другими ВС, которая определяется на основе измерения параметров их взаимного движения, например, дальности, разности высот, угловых координат и т. д.
Системой предупреждения столкновений называется совокупность бортовых радиоэлектронных средств и элементов самолетного оборудования, включающая измерители относительного положения ВС, устройства обработки данных и команд и предназначенная для выполнения задач предупреждения опасных сближений и столкновений ВС в воздухе. СПС дополнительно выдает экипажу информацию о рекомендуемом маневре для предотвращения столкновения на основе более детального анализа воздушной обстановки.
Основными задачами, решаемыми СПС, являются:
— обнаружение в окружающем воздушном пространстве всех потенциально опасных с точки зрения столкновений самолётов;
— определение относительного положения угрожающего самолёта по
дальности и высоте и, возможно, по азимуту;
— оценка времени до возможного столкновения;
— определение целесообразных маневров уклонения от столкновения, а
так же моментов их начала и окончания;
— индикация экипажу самолёта данных о воздушной обстановке и команд
на выполнение маневров уклонения.
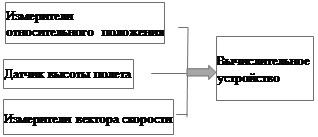
Конфигурация СПС и её структура зависят от предназначения самолёта и задач, решаемых СПС. Основными средствами, входящими в СПС, являются средства для измерения относительного положения самолётов, источники информации о высоте полёта и векторе скорости, вычислительное устройство, средства индикации и управления (рис 1).
Для измерения относительного положения могут использоваться радиодальномеры с ответчиками, без ответчиков, бортовые РЛС и другие средства. Роль источников информации о высоте полёта и векторе скорости могут выполнять штатные бортовые средства (системы воздушных сигналов, инерциальные навигационные системы, доплеровские измерители скорости и сноса). Обработка данных производится в специализированном вычислительном устройстве, входящем в состав СПС.
 | |||
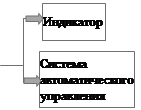 | |||
Рис.1. Структурная схема СПС
Сигналы управления поступают на специальные индикаторы или на командные стрелки директорных приборов. При автоматическом управлении сигналы управления подаются в систему автоматического управления (в каналы управления тягой двигателей и угловыми движениями самолёта).
Для определения параметров относительного положения и относительного перемещения самолётов могут измеряться расстояния между самолётами, скорости сближения, курсовые углы самолётов, углы места и высоты полёта. Для определения параметров относительного положения и сближения можно также использовать информацию о параметрах собственного движения и движения угрожающего ВС, полученную по каналам обмена данными.
Результаты измерений указанных первичных параметров обрабатываются в СПС по соответствующим алгоритмам, в результате чего формируются такие вторичные параметры, необходимые для решения задач СПС, как дистанция, интервал, превышение, мгновенный промах и т.д.
Принципы построения СПС
Системы предупреждения столкновений YG-1054, YG-1081, AVOID [2, 3] были разработаны в США и предназначены для использования на самолётах с различными лётно-техническими характеристиками и на вертолётах.
Сигнализатор опасных сближений вертолётов YG-1054 обеспечивает предупреждение об опасном сближении вертолётов за 10 с до возможного столкновения. В состав аппаратуры сигнализатора входят передатчик, приёмник, процессор, барометрический датчик высоты, три антенны, индикатор пилота, пульт управления. В режиме запроса излучаются два двухимпульсных сигнала со случайной частотой следования (около 50 запросов в 1 с). Интервал между двухимпульсными сигналами задаётся в системе в виде линейной функции от высоты полёта. Одновременно в запросчике формируется строб дальности, позволяющий устанавливать требуемую дальность обнаружения. Сигнал тревоги формируется при условии, что в серии из 16 запросов принимается не менее 4 ответных посылок (или из 24 запросов — 8). Тем самым обеспечивается снижение вероятности ложных тревог. Для определения положения конфликтных вертолётов по высоте их опрос производится в три этапа вертолётов, находящихся выше защищающегося вертолёта, на его уровне и ниже его. Для этого соответственно изменяется временной интервал между парами импульсов запросного сигнала. В каждом высотном слое опрос производится в течение 1/3 с. При нахождении отвечающего вертолёта в соответствующем высотном слое аппаратура сигнализатора опасных сближений этого вертолёта излучает двухимпульсный ответный сигнал. Определение направления (квадранта) на вертолёт — «нарушитель» производится в результате измерения разности времён прихода ответных сигналов от антенн, расположенных в трёх различных точках фюзеляжа вертолёта.
СПС YG-1081 [2, 3] разработана на базе индикатора YG-1054 и предназначена для использования на самолётах с достаточно высокими летными характеристиками. В состав системы входит приёмоответчик с пультом управления, три всенаправленные антенны и «вычислитель ?». В системе периодически измеряются дальность, относительная высота и азимут отвечающего самолёта, на основе чего вычисляется время до предполагаемого столкновения –«?». При уменьшении этого времени до 15 с выдаётся сигнал опасности. Одновременно на индикаторе высвечивается квадрант и положение по высоте конфликтного самолёта. Основные режимы работы СПС YG-1081, а также рабочие параметры такие же, как в системе YG-1054. Существенное различие между системами заключается в дополнительной обработке сигналов, применяемых в системе YG-1081 для оценки отношения расстояния между самолётами к скорости сближения с запрашиваемым самолётом. Вычисление «?» производится с помощью корреляционной схемы, в которой новые и старые сведения о расстоянии между самолётами сравниваются через интервал времени, составляющий 1,5 с.
Система AVOID имеет дальность действия до 40 км, темп выдачи запросных сигналов от 2 до 10 запросов/с в зависимости от степени опасности. Рабочая зона по высоте равна 25000 м. Эта зона разбита на 10 высотных зон. В каждой зоне производится не менее шести запросов подряд и шести измерений расстояния.
Отечественная бортовая СПС “Эшелон” [2,3] обеспечивает сигнализацию о появлении угрозы столкновения, а также формирование и выдачу команд на выполнение взаимно-координированных маневров уклонения от столкновений, отображаемых на специальном пульте индикатора пилота. Система “Эшелон” работает в диапазоне частот 1592,5 – 1622,5 МГц на двух фиксированных частотах. Аппаратура системы состоит из двух антенн, приёмопередатчика, измерительно-логического блока и пульта – индикатора команд. Система связана с системой воздушных сигналов (СВС) самолёта, самолётным ответчиком системы вторичной радиолокации и самолётным переговорным устройством. От СВС в систему поступают данные о высоте полёта. Через самолётный ответчик от СПС передаются на наземные пункты УВД сообщения об обнаружении конфликтной ситуации и предполагаемых маневрах уклонения самолёта. Самолётное переговорное устройство используется для сигнализации экипажу об угрозе столкновения.
Принцип действия системы состоит в следующем. Аппаратура каждого
самолёта излучает запросные сигналы, содержащие информацию о высоте полёта h0. Запросный сигнал представляет сообщение объёмом 12 двоичных разрядов, из которых 10 разрядов используется для передачи кода высоты, а 2 разряда – для указания «степени свободы». На самолётах, получивших запрос с самолёта, находящегося на высоте h0, ответные сигналы формируются в зависимости от разности высот h – h0. При разности высот меньше 160 м в ответном сигнале содержится признак опасной зоны (ОП). В ответных сигналах самолётов, находящихся в нижней и верхней зонах предупреждения, содержится признак нахождения в зоне предупреждения (ВЗП, НЗП). Самолёты, находящиеся во внешних зонах, ответные сигналы не излучают. На запрашиваемом самолёте по времени прихода ответного сигнала производится измерение дальности, по которому определяется время до столкновения . При нахождении самолёта в опасной зоне после достижения ?кр на табло самолёта индицируются команды, запрещающие горизонтальные маневры, и начинается дополнительный обмен информацией между самолётами с целью выработки согласованных маневров уклонения.
СПС “Эшелон” обладает высокой пропускной способностью. Так, при
нахождении в радиусе действия системы до 200 самолётов одновременно вероятность правильного обнаружения конфликтной ситуации за время Т=3 с равна 0,98 при вероятности ложной тревоги Рл.т.=10-12.
Статьи к прочтению:
Марсель — Предубеждение и гордость
Похожие статьи:
-
Система предупреждения столкновений тсаs-ii
Система ТСАS-II предназначена: — для обзора воздушной обстановки и обнаружения оборудованных международным и ответчиками УВД сближающихся ВС, находящихся…
-
Общие сведения о системе классов улиц и домов
Комплексная лабораторная работа по дисциплине ПКШ “Система классов улиц и домов” Руководство пользователя (вид документа) писчая бумага (вид носителя) 15…