
Описание программы исследований
Теоретические сведения
В настоящее время интенсивно развивается теория и практика автоматических систем навигации по геофизическим полям, в полной мере удовлетворяющих всей совокупности требований, предъявляемых к современным средствам навигации летательных аппаратов .
Автоматическая навигация по геофизическим полям с определением местоположения основана на сопоставлении текущего изображения (ТИ), получаемого с помощью бортовой системы наблюдения поля (датчика поля), с информацией о поле или опорном эталонном изображении (ЭИ), хранящейся в бортовой памяти. Сопоставление осуществляется обычно посредством вычисления некоторого функционала типа корреляционной функции (КФ) и поисковым или беспоисковым нахождением экстремума этой характеристики.
В последнее время КЭНС находят широкое признание и применение. Они имеют разнообразную структуру и могут иметь различное предназначение. Одним из удобных способов классификации КЭНС является классификация по объему или характеру полезной информации, снимаемой с навигационного поля бортовым датчиком в каждый момент времени или за короткий цикл сканирования. В соответствии с этим КЭНС делятся на три основных класса (рис. 1):
КЭНС-I — в системах этого класса рабочая информация в текущий момент времени снимается в точке, т.е. выходной сигнал датчика поля представляет скалярную величину;
КЭНС-II — для систем данного класса характерным является то, что бортовой датчик за короткий цикл сканирования мгновенно снимает информацию о поле вдоль произвольных, но заранее выбранных, линий. Таковыми, в частности, могут служить линии, перпендикулярные к продольной (в случае поперечного сканирования антенной зондируемой поверхности) или поперечной (при продольном сканировании) оси летательного аппарата;
КЭНС-III — к этому классу относятся системы, в которых рабочая информация снимается с участка площади земной поверхности (кадра), просматриваемого бортовой системой в каждый момент времени или за короткий цикл сканирования (КЭНС с сопоставлением изображений).
По методу определения отклонения от экстремума КЭНС подразделяются на эвристические, поисковые, беспоисковые оптимальные (субоптимальные) и комбинированные. Такая классификация в некоторой мере соответствует алгоритмам КЭНС, которые могут быть реализованы в КЭНС-I, КЭНС-П и КЭНС-III на базе аналоговой, аналого-цифровой и цифровой техники.
В теоретических исследованиях и математическом моделировании на первом этапе развития теории и разработки КЭНС рассматривалась, в основном, четырехточечная дифференциальная схема формирования сигналов коррекции отклонения от экстремума КФ[1].
Главным недостатком дифференциального беспоискового алгоритма является потеря работоспособности системой при начальных рассогласованиях, превышающих радиус корреляции поля, а также при нестационарности поля по дисперсии, математическому ожиданию и спектру.
Второе направление в развитии теории КЭНС составили поисковые алгоритмы. Теория таких систем строится на основе широко известной теории статистических решений. Особенностью поисковых алгоритмов
является отсутствие ограничений на величину начальных ошибок навигационной системы.
Однако, реализация данных алгоритмов, особенно в случае решения задачи многопараметрического оценивания, требует значительной производительности бортовой цифровой вычислительной машины (БЦВМ). В данной лабораторной работе исследуется КЭНС-IIБ (см. рис. 1), которая является аналогомсистемы навигации по рельефу местности типа ТЕRСОМ. Метод навигации и наведения посредством сопоставления профилей рельефа местности ТЕRСОМ (Terrain Contour Matching) предназначен для применения на борту различных летательных аппаратов: пилотируемых и беспилотных самолетов, крылатых ракет, головных частей баллистических ракет. В основу метода построения системы ТЕRСОМ положен следующий принцип: географическое положение любой точки земной поверхности (суши) описывается единственным образом с помощью вертикальных профилей или топографией окружающей местности, аналогично тому, как каждый человек обладает своими неповторимыми отпечатками пальцев. Как и при анализе отпечатков пальцев, такая система требует предварительного картографирования или иного определения характеристик профилей поверхности того района, над которым система будет использоваться. Это может быть сделано, например, по стереоскопическим аэроснимкам местности с помощью известных в настоящее время способов. Предварительно определенные данные о рельефе района полетов запоминаются в цифровом виде в бортовом запоминающем устройстве.
Во время полета система ТЕRСОМ измеряет вертикальный профиль рельефа вдоль истинной траектории полета с помощью радиовысотомера (для измерения геометрической высоты полета) и баровысотомера (для получения уровня отсчета профиля). Вычитая текущую высоту, измеренную радиовысотомером, из барометрической высоты ,система определяет профиль рельефа вдоль траектории полёта организует поиск в памяти вычислителя наиболее похожего, заранее запомненного профиля с известными координатами. Поиск осуществляется последовательным сопоставлением сигнала ТИ датчика поля с цифровым образом ЭИ и просмотром сначала назад и вперед предполагаемого местоположения, а затем поперек траектории в пределах матрицы размером 64 Х 64 ячейки (при размере ячейки ? от 30м Х 30м до 240м Х 240м).
Процедура сопоставления представляет собой минимизацию абсолютной разности, приближенно определяемой выражением

, где Нист -превышение рельефа вдоль истинной траектории полёта,
Hкарт- превышение рельефа, выбранное из бортовой карты,
?i, ?i- координаты летательного аппарата.
Конкретному исследованию в лабораторной работе подвергаются
качественные показатели обнаружения заданного участка ЭИ по предъявляемому ТИ в поисковой КЭНС.
В поисковых КЭНС проверяются гипотезы о возможных значениях ошибок местоположения и скорости движущегося объекта. Для каждой проверяемой гипотезы на основе измерений геофизического поля и ,имеющейся бортовой карты этого поля, с использованием данных навигационной системы считываются значения функционала, являющегося мерой близости полученной в полете реализации поля и реализации поля, извлекаемой из блока памяти и соответствующей проверяемой гипотезе. Путем поиска экстремума функционала по всем проверяемым гипотезам определяются координаты местоположения и скорость движения. Методы достижения экстремума функционала могут быть различными.
Может применяться слепой поиск, когда вводится дискретизация координат и значения функционала рассчитываются абсолютно для всех возможных. дискретных значений ошибок ГНС (главной навигационной, например инерциальной, системы). Такой метод поиска, являющийся в определенных условиях единственно возможным, надежно решает проблему ликвидации больших начальных отклонений в КЭНС, хотя в некоторых случаях требует чрезмерно высокой производительности БЦВМ.
Другая группа методов поиска связана с вычислением градиентов (или их аналогов) функционала, определяющих направление движения к экстремуму. Здесь требования к быстродействию БЦВМ обычно оказываются ограниченными, так как не возникает необходимость рассчитывать значения функционалов для всевозможных ошибок ГНС, но возникают ограничения сходимости.
Рассмотрим эвристические поисковые алгоритмы одномерной КЭНС для оценки местоположения. Будем рассматривать равномерный горизонтальный полет. Пусть к текущему моменту времени t, когда принимается решение, проведено N измерений геофизического поля Z1= f*1, …,ZN=f*N (рис. 2, а) и пусть в памяти БЦВМ записана карта поля fn(x) (рис. 2, б).
В поисковых КЭНС производится запись в оперативное запоминающее устройство измеренных значений поля Zi=f*i и, выдаваемых ГНС, координат местоположения x*i в момент проведения измерений. Пусть x*n — координата местоположения в момент последнего замера.
Эвристический алгоритм поисковой КЭНС сводится к следующему: назначается доверительный интервал 2?max с центром в точке x*N. где ?mах-возможная максимальная ошибка ГНС.

Задается шаг дискретизации по координате ?I и в доверительном интервале с
этим шагом выбирается ряд дискретных точек. В дальнейшем
предполагается, что реальное положение летательного аппарата совпадает с одной из дискретных точек. В действительности это условие может и не выполняться.
Однако если величина ?I невелика, введение дискретизации при проверке гипотез не приводит к существенным ошибкам. В рассматриваемом случае гипотезами Hi являются возможные дискретные значения i?1 продольной ошибки ГНС ?х (i =-n, …,n; n=?max/?I). Поскольку мы предположили отсутствие ошибки измерения скорости и постоянство ?х в процессе проведения измерений геофизического поля, то, с точностью до шумов датчика поля и ошибок картографирования, измеренная реализация совпадает с некоторым участком реализации навигационного поля, хранящейся в блоке памяти.
В процессе перебора различных возможных значений ошибок ГНС (т.е. проверки различных возможных гипотез Hi, состоящих в предположении, что ошибка ?х=i?1) из блока памяти извлекается для каждой проверяемой гипотезы соответствующая ей (гипотетическая) реализация поля:
{fn[x*N-i?1-(N-1)L],fn[x*N-i?1-(N-2)L],…,fn(x*N-i?1-L),fn(x*N-i?1)}. Сопоставляется гипотетическая реализация поля с измеренной:
Z1=f[XN-(N-1)L], …, ZN-1=f(XN-L), ZN=f(XN),
где XN — действительное местоположение ЛА в момент проведения последнего замера,
L — расстояние, пролетаемое ЛА между последовательными измерениями. В результате такого сопоставления получается некоторое число Ii, которое характеризует степень совпадения измеренной и проверяемой гипотетической реализации. Величина Ii=I(Hi) зависит от измеренной и гипотетической реализаций навигационного поля. Кроме того,
Ii является функцией проверяемого значения ?x=i?1 ошибки навигационной системы.
Могут использоваться различные виды функционалов Ii, но они должны обладать общим обязательным свойством: в идеальных условиях, при отсутствии ошибок измерения поля и картографирования и других возмущений, функционал должен достигать абсолютного (глобального) экстремума на истинной гипотезе, т.е. при ?X=X*N –XN. Тогда и в условиях неизбежных возмущений, рассчитав значения функционала для всех возможных значений ошибки ГНС и, выбрав то значение ошибки ?х, при котором функционал достиг экстремума, мы получим оценку местоположения, близкую к истинной. Точность этой оценки будет тем выше, чем меньше ошибки измерения геофизического поля и больше длина обрабатываемой реализации (число измерений поля N).
В качестве функционалов в эвристических поисковых алгоритмах используются:
среднее произведение

средняя абсолютная разность

средний квадрат разности

Если ошибки картографирования отсутствуют, т.е. в одних и тех же точках fn(x)=f(x), где f(x) — истинное значение геофизического поля, а датчик поля производит измерения абсолютно точно ZN-k=f(XN-kL) , то выражения для функционалов принимают вид
 |
 |
Видно, что все функционалы имеют абсолютный экстремум для проверяемой ошибки 1?1, совпадающей с действительной ошибкой ГНС ?X=X*N-XN. В этом случае I2i=I3i=0 и эти функционалы достигают абсолютного минимума. Функционал 1ц достигает на истинной гипотезе абсолютного максимума. Обоснованием функционала I1i является известное свойство корреляционной функции Rff(?) стационарного процесса f(x) достигать абсолютного максимума при нулевом сдвиге ?=0. Действительно, если поле стационарное и эргодическое, а длина реализации NL достаточна для проявления эргодичности, то
 |
и абсолютный максимум I1i достигается при i?1=X*N-XN=?X. В лабораторной работе при экспериментальных исследованиях используется алгоритм I1i.
Описание программы исследований
Для выполнения лабораторной работы применяется программа, имитирующая работу поисковой КЭНС для одномерного случая, она позволяет наглядно увидеть зависимость правильного определения (поиска) от заданных параметров системы, таких как уровень шума, размер выборки эталонного и текущего изображений.
- Для запуска программы «кликнете»дважды на значке исполняемого файла
 KENS1.EXE. Окно программы имеет следующий вид:
KENS1.EXE. Окно программы имеет следующий вид:

- Следующее действие — ввод начальныхданных. Для задания начальных данных нажмите кнопку
 в левом верхнем углу окна программы.
в левом верхнем углу окна программы.
- В появившемся окне «Параметры» Вы можете задать:
Информация об эталонном изображении
-Размер основного поля (эталонного изображения — ЭИ) вдоль
линии полёта ЛА. Параметр задается в диапазоне от 1000 до 10000 единиц. Здесь и
далее (1000..10000) — размер поля в дискретных элементах. ЭИ задается в виде фиксированной реализации случайного процесса, типичной для изотропно отражающих земных поверхностей. Дисперсия реализации ЭИ нормирована к 1.

Информация о текущем изображении
— Задайте размер фрагмента ЭИ в окне «ширина» и начальную координату его расположения на ЭИ: окно «начало».
Этот фрагмент и подлежит обнаружению в процессе выполнения лабораторной работы.
Обратите внимание на то, чтобы выбранные значения ширины и начальных координат не противоречили(не превышали) выбранному ранее значению размера основного поля ЭИ.
Текущее изображение, получаемое в реальных системах с помощью бортовой системы наблюдения поля (датчика поля), в данном случае будет являться суммой выделенного фрагмента ЭИ и помехи.
— Задайте интенсивность помехи в поле интерактивного интерфейса: « шум» (0..100%)
- Задав параметры, нажмите накопку
 и ознакомьтесь с результатами.
и ознакомьтесь с результатами.
Выглядеть они могут так:

Эталонное изображение, генерируемое программой, является случайным, следовательно, от опыта к опыту изображения в окне программы будут меняться.
Эксперимент
Для проведения повторного опыта с заданными ранее параметрами повторите пункты 1 и 4.
Найденное в результате опыта изображение может и не соответствовать заданному отрезку ЭИ. Попробуйте провести несколько опытов с различными значениями параметров «шум» и «ширина» и наглядно оценить зависимость вероятности правильного обнаружения от интенсивности помехи и размера выборки текущего изображения (ТИ).
Статистика
В основном окне интерфейса (окно с результатами опыта, на рисунке выше) можно задать количество статистических экспериментов для заданной реализации ЭИ.

В этом разделе исследуются гистограммы:
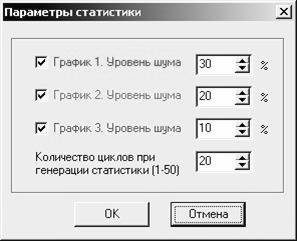
a) вероятности правильного обнаружения выделенного фрагмента ЭИ от дисперсии помехи, зашумляющей ТИ (кнопка  ), при ранее заданном и фиксированном размере ширины участка поля для поиска; В появившемся окне указать данные, заданные преподавателем.
), при ранее заданном и фиксированном размере ширины участка поля для поиска; В появившемся окне указать данные, заданные преподавателем.
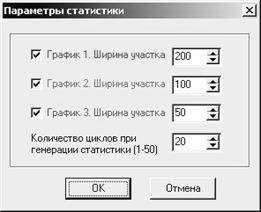
b) вероятности правильного обнаружения фрагмента ЭИ от размера
ширины участка поля для поиска при ранее заданной и фиксированной
дисперсии помехи, зашумляющей ТИ. (кнопка  )
)
Вопросы для экспериментальных исследований
1.С помощью программы — эмулятора КЭНС провести ряд опытов, в результате которых, определить влияние размера фрагмента ЭИ (ширины участка поля для поиска), на вероятность правильного обнаружения. Для этого: В окне «Параметры» задать фиксированный уровень помехи в 25%. 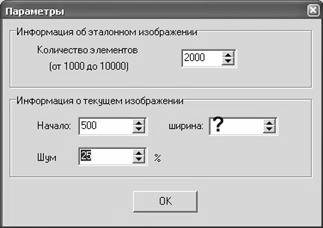 Изменяя от опыта к опыту значение размера фрагмента ЭИ («ширина») найти такое, при котором вероятность правильного обнаружения составит примерно 0.5 (т. е. половина из проведенных опытов даст положительный результат: заданный фрагмент ЭИ будет обнаружен верно).
Изменяя от опыта к опыту значение размера фрагмента ЭИ («ширина») найти такое, при котором вероятность правильного обнаружения составит примерно 0.5 (т. е. половина из проведенных опытов даст положительный результат: заданный фрагмент ЭИ будет обнаружен верно).  В отчете зафиксировать числовые данные окна «Параметры».
В отчете зафиксировать числовые данные окна «Параметры».
2.Провести опыт, аналогичный п.1, но ,в данном случае, необходимо задать фиксированный размер фрагмента ЭИ ( значение «ширина» сделать равным 20 элементам) и определить приближенно дисперсию помехи ТИ , при которой вероятность правильного обнаружения составит примерно 0.5 (т. е. половина из проведенных опытов даст положительный результат: заданный фрагмент ЭИ будет обнаружен верно). В отчете зафиксировать числовые данные окна «Параметры».
3.
 |
Для зафиксированных числовых данных окна «Параметры» для п.1 и п.2 провести статистические исследования с использованием гистограмм, при задании возможно наибольшего количества Nmax статистических экспериментов. Для п.1 это будет выглядеть следующим образом:
А график статистической зависимости будет выглядеть примерно так:

4. Исследовать сходимость результатов измерений гистограмм при возрастании количества Ni статистических экспериментов. Сходимость определить как среднеквадратическую разность?2 значений соседних по Ni (то есть для Ni и Ni+i, 1=1…n, Ni
Содержание и порядок оформления отчета
Отчет оформляется в соответствии с требованиями С-Пб ГУАП и должен содержать следующие материалы:
- Теоретические сведения иалгоритмы работы поисковых КЭСН.
- План экспериментальных исследований покаждому пункту проведения лабораторной работы.
- Результаты экспериментальных исследований (числовые данные и гистограммы) по п.1 и п.З.
- Результаты экспериментальных исследований (числовые данные и гистограммы) по п.2 ип.З.
- Результаты экспериментальных исследований (график ?2=f(Ni)) по п.4 для n = ?, Nn+i=Nmax для одного из вариантов: п.2 или п.З.
- Выводы по результатамэкспериментальных исследований.
Контрольные вопросы
1. Поясните принципы работы и отличительные черты основных типов КЭСН.
2.От каких факторов зависит точность и надежность работы КЭСН ?
3. Дать графическую интерпретацию функционалов эвристических поисковых алгоритмов КЭСН.
4.Охарактеризовать каждый из типов КЭСН по классификации рис. 1.
5. Составить вариант граф-схемы программы исследования КЭСН.
6. Перечислить показатели технической эффективности поисковых и безпоисковых КЭСН.
7.От каких факторов зависит вероятность правильной и ложной привязки ТИ и ЭИ ?
8.Что надо учитывать при составлении плана экспериментальных исследований поисковых КЭСН ?
9. Прокоментируйте выводы и результаты экспериментальных исследований.
10.Что понимают под сходимостью результатов экспериментальных исследований ?
Литература
1. Белоглазов И. Н., Джанджгава Г. И., Чигин Г. П. Основы навигации по геофизическим полям. — М.: Наука, 1985.-328 с.
2.Белоглазов И. Н., Тарасенко В. П. Корреляционно — экстремальные системы. — м.: Сов. радио, 1974. — 392 с.
Автоматическая навигация по геофизическим полям с определением местоположения основана на :
А) Сопоставлении текущего изображения, получаемого с помощью бортовой системы наблюдения поля, с информацией о поле или опорном эталонном изображении , хранящейся в бортовой памяти.
Б) Сопоставлении текущего изображения, получаемого с помощью бортовой системы наблюдения поля , с информацией о поле или опорном изображении , полученном при предыдущей итерации.
В) Визуальном сравнении текущего изображения местности с топографической картой пилота.
Г) Ни отчего не зависит.
По какому виду информации работает КЭСН вида II?
А) Информация снимается вдоль линии.
Б) Информация снимается в «точке»
В) Информация снимается с кадра
Г) По принципу Запрос-Ответ.
По какому виду информации работает КЭСН вида I?
А) Информация снимается вдоль линии.
Б) Информация снимается в «точке»
В) Информация снимается с кадра
Г) По принципу Запрос-Ответ.
По какому виду информации работает КЭСН вида III?
А) Информация снимается вдоль линии.
Б) Информация снимается в «точке»
В) Информация снимается с кадра
Г) По принципу Запрос-Ответ.
Как определяются координаты местоположения и скорость движения?
А) По сдвигу доплеровских частот
Б) Путем поиска экстремума функционала по всем проверяемым гипотезам.
В) По спутниковым навигационным системам
Г) Навигационная система «Омега»
Когда Может применяться слепой поиск?
А) когда вводится дискретизация координат и значения функционала рассчитываются абсолютно для всех возможных. дискретных значений ошибок ГНС системы.
Б) когда нужно решить проблему ликвидации больших начальных отклонений в КЭНС
В) Только в КЭСН-I и КЭСН-II
Г) В КЭСН не применяется.
Какими обязательными свойствами должны обладать функционалы?:
А) Никакими
Б) в идеальных условиях, при отсутствии ошибок измерения поля и картографирования и других возмущений, функционал должен достигать абсолютного (глобального) экстремума на истинной гипотезе.
В) в идеальных условиях, при отсутствии ошибок измерения поля и картографирования и других возмущений, функционал должен обращаться в ноль на истинной гипотезе.
Г) Обычными свойствами для функционалов. J