
Особую осторожность следует соблюдать при работе с приёмо-передатчиками и индикаторами.
Лекция 9
СУДОВЫЕ НАВИГАЦИОННЫЕ РЛС
9.1. ОСОБЕННОСТИ РАБОТЫ НАВИГАЦИОННЫХ ДОПЛЕРОВСКИХ РЛС
Принцип действия РЛС системы Доплера — Белопольского состоит в том, что при относительном движении РЛС и объекта частота принимаемых отраженных сигналов не остается постоянной, а изменяется по определенному закону.
Это свойство было открыто в 1842 году австрийским физиком Х. Доплером и впервые экспериментально проверено в лабораторных условиях для световых волн в 1900 г. русским физиком А. А. Белопольским.
Величина вышеуказанного изменения частоты зависит
— от скорости и направления относительного перемещения РЛС и объекта
— от длины волны (частоты) радиолокационной станции.
Передатчик излучает зондирующие сигналы в виде непрерывных немодулированных колебаний частотой f1.
Частота f2 сигналов, отраженных от объекта и попадающих в приемную антенну РЛС, будет отличаться от частоты f1 зондирующих сигналов на величину так называемой доплеровской частоты
(FD) f2 = F1 ± FD .
Знак плюс соответствует сближению РЛС и объекта, а минус – удалению.
Ослабленные зондирующие сигналы и принимаемые отраженные сигналы поступают на вход приемника, создают биения с разностной частотой f1 – f2 , и после детектирования на входе приемника получаем колебания доплеровской частоты, которая равна
где VP — радиальная составляющая скорости перемещения объекта;
l — длина волны зондирующих сигналов РЛС.
Если выразить длину волны в сантиметрах, а радиальную скорость объекта — в километрах в час, то расчетная формула доплеровской частоты в герцах примет вид
Зависимость доплеровской частоты от направления движения объекта (цели), находящегося в точке О, может быть охарактеризована диаграммой в полярных координатах, представленной на рис. 11.2.



| — FD |
 В этой диаграмме радиус-вектор ха-рактеризует направление движения объек-та, а длина вектора – значение доплеров-ской частоты с учетом знака. Увеличениедоплеровской частоты отмечено на диа-граммме знаком плюс, а уменьшение – знаком минус.
В этой диаграмме радиус-вектор ха-рактеризует направление движения объек-та, а длина вектора – значение доплеров-ской частоты с учетом знака. Увеличениедоплеровской частоты отмечено на диа-граммме знаком плюс, а уменьшение – знаком минус.

| + FD |
 Эффект Доплера вызывает смещение частотного спектра отраженного сигнала, который можно иллюстрировать графика-ми (рис. 11.3).
Эффект Доплера вызывает смещение частотного спектра отраженного сигнала, который можно иллюстрировать графика-ми (рис. 11.3).


| ДРЛС |

 Приближение и удаление объекта относительно РЛС вызывает соответст-вующий сдвиг частоты отраженных сиг-налов
Приближение и удаление объекта относительно РЛС вызывает соответст-вующий сдвиг частоты отраженных сиг-налов
от fmin = f1 – FD до fmax = f1 + FD. Следовательно, спектральные линии будут перемещаться по оси частоты f, как пока-зано на рисунке.
 | |||||||
 | | | |||||
| f1 – FD f1 f1+FD |
График спектра отраженного сигнала.
 s – амплитуда сигнала; f – частота.
s – амплитуда сигнала; f – частота.
Доплеровские РЛС с непрерывным излучением сигналов широко используются для измерения путевой скорости самолетов, скорости ветра, скорости автомобильного транспорта и пр.
В последнее время доплеровские РЛС начали широко использовать в судовождении для измерения скорости причаливания судов.
Это объясняется тем, что появление крупнотоннажных судов, в частности танкеров водоизмещением 150 – 200 тыс. т и более, вызвало необходимость принятия мер, предотвращающих повреждения при швартовке таких судов к причалу.
Оснащение судов подруливающими устройствами, использование швартовных буксиров и тому подобные меры не решают проблемы полностью.
При швартовке судоводитель должен иметь исчерпывающую информацию о положении судна относительно причала и его скорости.
Применяемые визуальные методы определения скорости судна и расстояния до причала по береговым предметам при швартовке крупнотоннажных судов стали непригодными.
Многие из существующих причалов не могут выдержать соприкосновения с ними судна водоизмещением 150 – 200 тыс.т, если его скорость превышает 3 – 5 м/мин. Следовательно, возникает необходимость в точном измерении скорости судна, достигающей 0,5 – 1 м/мин.
В структурную схему входит:
генератор ГСВЧ непрерывных немодулированных колебаний сверхвысокой частоты f0 ,
— развязывающее устройство РУ,
— направленная антенна А,
— смеситель См,
— усилитель доплеровской частоты УДЧ,
— индикатор.
Зондирующие колебания сверхвысокой частоты f0 через развязывающее устройство попадают в антенну и одновременно, после ослабления в развязывающем устройстве, подаются на вход смесителя приёмника.
Отраженные сигналы с частотой f0 ± FD поступают на вход смесителя и смешиваются с частотой зондирующих сигналов f0 .
Возникающие биения разностной частоты создают на входе смесителя доплеровскую частоту FD , усиливаемую каскадами УДЧ.
Индикаторомслужит устройство, измеряющее доплеровскую частоту.
Поскольку радиальная скорость объекта VP и доплеровская частота связаны между собой линейной зависимостью  , указанный индикатор–частотомер может быть отградуирован в единицах скорости (например, в метрах в минуту).
, указанный индикатор–частотомер может быть отградуирован в единицах скорости (например, в метрах в минуту).
Практически при использовании доплеровской РЛС в качестве измерителя скорости движения объектов оказывается необходимым выяснить, в каком направлении движется объект относительно ДРЛС, т.е. приближается или удаляется.
Эту задачу можно выполнить несколько способами.
1. С помощью отдельных фильтров, настроенных на частоты f0 – FD и f0 + FD , лежащие по обе стороны частоты зондирующего сигнала f0 .
В первом случае частота отраженного сигнала оказывается ниже частоты f0 , следовательно, объект удаляется от ДРЛС.
Во втором случае наоборот – частота отраженных сигналов оказывается выше частоты f0 , следовательно, объект приближается к ДРЛС.
2. Знак доплеровской частоты можно определить также фазовым методом. путем обработки принятых отраженных сигналов в двухканальной схеме приёмного устройства, как это показано на рис. 9.5.
 ,
,
Если объект приближается, то выходные напряжения I и II каналов будут выражаться следующими зависимостями:
 ;
;
 ,
,
где Em – амплитуда напряжения сигнала;
j — постоянный фазовый угол, зависящий, например, от дальности первоначального
обнаружения объекта (цели).
При удалении объекта относительно ДРЛС напряжения выходных сигналов обоих приёмных каналов будут определяться следующими уравнениями:
 ;
;
 .
.
Таким образом, направление движения объекта определяется опережением или запаздыванием фазы выходного сигнала II канала приёмника относительно I канала.
Индикацию направления движения объекта можно обеспечить, например, использованием двухфазного синхронного электродвигателя.При изменении фазы выходного сигнала направление поворота электродвигателя укажет направление движения объекта (цели).
Доплеровские РЛС имеют:
максимальную дальность обнаружения объектов до 3000 м,
минимальную — до 0,5 м
В них применяется стрелочный индикатор, проградуированный в единицах скорости (м/мин).
Отклонение стрелки вправо соответствует сближению доплеровской РЛС с объектом,
отклонение влево — удалению от него.
Обычно на индикаторе имеется несколько шкал скорости, например 0 — 15, 0 — 30, 0 — 150 м/мин.
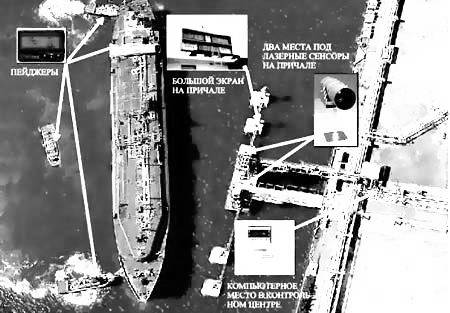
Доплеровская РЛС может устанавливаться на судне (антенна направлена на стенку причала) или на причале (антенна направлена на судно).
На больших судах приемопередатчики и антенны обычно размещают в носу и в корме, а индикаторы— на крыльях ходового мостика.
При размещении доплеровской РЛС на причале используют 2 или 3 передвижных комплекта станции:
например, одна определяет скорость судна при входе в порт,
две другие — скорость приближения судна к причалу носом и кормой.
Данные о скорости передаются капитану по радиотелефону или посредством светящегося табло.
Вопрос обеспечения безопасности мореплавания — один из главных в морском судоходстве. Соблюдение мер безопасности в портах мира подчеркивается международной конвенцией. Доплеровскими РЛС или как их ещё называют системами лазерной швартовки судов, давно оснащены все порты мира.
Рассмотрим внедрение такой современной лазерной системы безопасности швартовки крупнотоннажных судов на примере порта Новороссийск на Чёрном море.
В России именно Новороссийск, как особо значимый порт, выбран первым, где была внедрена лазерная система на четырех глубоководных причалах порта.
Аппаратура системы LDS-200, разработана и изготовлена датской компанией Marimatech.
Она определяет скорость движения судна, расстояние и угол его подхода к причалу с точностью до одного сантиметра.
Используя ее совместно с системой гидрометеомониторинга, можно обеспечить полную безопасность прохождения судов в любое время суток и в любую погоду.
Это значительно поднимает статус порта, обеспечивает безопасность прохождения судов и делает порт привлекательным для грузоотправителей и грузополучателей.
Лазерная система LDS-200 является вспомогательной для лоцманской службы порта и предназначена для повышения безопасности в процессе причаливания и швартовки судов, а также мониторинга их состояния после постановки к причалу. Ниже приведена структурная схема системы (рис. 11.6) и внешний вид переносного лоцманского индикатора (рис. 11.7).

| Рис. 11.7. Переноснойлоцманский индикатор |
Функциональные возможностилазерной системы LDS-200:
— обеспечение лоцмана информацией о дистанции до причала и скорости сближения, а также гидрометеорологической информацией;
— документирование параметров движения судна при швартовке;
— обслуживание необходимого количества мест швартовки крупнотоннажных судов.
Система состоит из следующих элементов:
— лазерных сенсоров;
-метеостанции, включающей датчики скорости и направления ветра и датчик высоты волны;
-цифрового информационного табло;
-центра управления (ЦУ), включающего компьютер ЦУ с программным обеспечением, принтер, источник бесперебойного питания;
-канала связи, включающего мультиплексоры и оптоволоконную кабельную линию.
Сбор данных от датчиков системы и формирование группового сигнала осуществляется через мультиплексор.
Волоконнооптический кабель обеспечивает соединение мультиплексора на причале и в центре управления.
Отображение положения крупнотоннажных судов происходит на рабочем дисплее центра управления. Программное обеспечение (ПО) состоит из электронной карты и базы данных.
Данные по судам автоматически сохраняются на жестком диске компьютера ЦУ с возможностью просмотра процесса швартовки и вывода на печать.
ПО должно иметь модуль тестирования всей системы, включая компьютер ЦУ, датчики, табло. ПО производит расчет положения судов, скорости и направления ветра, волнения моря, температуры воздуха.
| Рис. 11.8. Интерфейслазерной системы LDS-200 |
 Цветной монитор позволяет отображать электронную карту порта с процессом швартовки судов и показаниями датчиков системы. Возможны вывод на печать информации о процессе постановки к причалу судна, а также подача информации за время всей стоянки судна у причала. БД содержит следующие данные: судовладелец; время начала/конца постановки к причалу; предупреждения в процессе постановки к причалу; данные по состоянию судна.
Цветной монитор позволяет отображать электронную карту порта с процессом швартовки судов и показаниями датчиков системы. Возможны вывод на печать информации о процессе постановки к причалу судна, а также подача информации за время всей стоянки судна у причала. БД содержит следующие данные: судовладелец; время начала/конца постановки к причалу; предупреждения в процессе постановки к причалу; данные по состоянию судна.
Информация с компьютера ЦУ (дальность до судна, скорость сближения по корме и носу) отображается на табло. Табло соединено кабелем с мультиплексором. Информация на табло читаема с расстояния 200 м в дневное и ночное время при нормальной видимости. Табло выполнено для условий взрывоопасной зоны.
Лазерная система LDS-200 подтвердила свои достоинства, позволив вести мониторинг всего процесса швартовки в реальном времени, представлять его в документальной форме, а также повысила безопасность эксплуатации нефтеналивного терминала и мореплавания в акватории порта Новороссийск.
9.2. ДЕВИАЦИЯ СУДОВЫХ НАВИГАЦИОННЫХ РЛС
По аналогии с судовыми радиопеленгаторами, при измерении направлений (азимута) на объекты наблюдения с помощью судовой РЛС также возникают систематические ошибки из-за влияния различного рода препятствий (вторичных излучателей), расположенных на пути распространения радиолокационных сигналов (мачт, труб, надстроек, такелажа и пр.).
Влияние препятствий сказывается на точности измерения азимута, как при передаче зондирующих сигналов, так и при приёме отражённых от объектов сигналов.
Поскольку эти факторы эквивалентны, они могут быть обобщены с помощью теоремы взаимности и рассмотрены для случая приёма радиолокационных сигналов.
Эти ошибки получили название девиации судовых РЛС или радиолокационной девиации (РЛД).
 Если, например, в точке О (рис. 11.19) находится отражённый объект, а в точке М – вторичный излучатель (мачта), то электро-магнитное поле принимаемых отражённых сигналов наряду с прямым воздействием на входе антенны РЛС возбуждает в поверхностном слое препятствия токи СВЧ, которые создают в окружающем пространстве вторичное (дифрагированное) поле.
Если, например, в точке О (рис. 11.19) находится отражённый объект, а в точке М – вторичный излучатель (мачта), то электро-магнитное поле принимаемых отражённых сигналов наряду с прямым воздействием на входе антенны РЛС возбуждает в поверхностном слое препятствия токи СВЧ, которые создают в окружающем пространстве вторичное (дифрагированное) поле.
В результате напряжённость Е0 сум-марного поляна входе антенны РЛС будет являться суммой поля Е1 прямой волны и поля Е2, дифрагированного от препятствия: 

В общем случае поле Е2 отличается от поля Е1 по амплитуде и фазе. Если принять ? – фазовый сдвиг между Е1 и Е2 , обуслов-
ленный разностью хода лучей прямой и дифрагированной волн (см. раздел 5.2 главы 5), то величина ? будет равна:
 где
где 
Тогда отношение 
или с учетом работы РЛС на передачу и приём радиолокационных сигналов:
 ?
?  (11.1)
(11.1)
Следовательно, из-за влияния препятствия суммарное поле на вход е антенны РЛС оказывается неравномерным и в пределах диаграммы направленности в горизонтальной плоскости имеет лепестковый характер.
Из анализа формулы (11.1) видно, что максимумы лепестков соответствуют условию:  , (11.2)
, (11.2)
где n = 1, 2, 3, и т.д. (количество лепестков).
При этом  .
.
Минимальные значения поля (  ) имеют место при:
) имеют место при:
 где k = 1, 2, 3, и т.д.
где k = 1, 2, 3, и т.д.
Из формулы (11.2) можно найти количество лепестков nЛ в пределах диаграммы направленности антенны в горизонтальной плоскости:

Поскольку nЛ – целое число, то полученное из выражения (11.2) значение nЛ должно быть уменьшено до ближайшего целого числа.
Таким образом, при DD = const с уменьшением длины волны l количество лепестков будет увеличиваться.
Практически из-за наличия потерь во вторичных излучателях напряженность поля E2 оказывается меньше E1.
Из-за лепесткового характера суммарного поля на входе антенны максимум её диаграммы направленности в горизонтальной плоскости смещается относительно оси симметрии антенны, что приводит к ошибкам в определении направления на объекты.
На рис. 11.20 показана схема изменения знака F радиолокационной девиации для случая, когда к носу от антенны РЛС и по корме находятся препятствия в виде носовой и кормовой мачт.
 Знак РЛД определяется по правилу «От неверного к верному».
Знак РЛД определяется по правилу «От неверного к верному».
F = p – q, (11.3)
где F – угол радиолокационной девиации;
p – курсовой угол (КУ) на пеленгуемый объект;
q –отсчёт радиолокационного курсового угла (РЛКУ).
Следовательно, при pq знак F будет положительным. Когда pq, знак F оказывается отрицательным.
Максимальное значение ошибки в отсчете азимута в данном случае можно определить по формуле:
 ,
,
где 2а1 – раскрыв антенны РЛС;
2а2 – диаметр мачты;
l — длина волны РЛС.
Как следует из данного выражения, с уменьшением длины волны РЛС ошибка в отсчёте азимута (направления), вызываемая препятствием, уменьшается.
В судовых условиях, когда на пути распространения радиолокационных сигналов находится большое число разных по форме и размерам препятствий (вторичных излучателей), величина ошибки (РЛД) может определяться только экспериментально, аналогично тому, как определяется радиодевиация судовых радиопеленгаторов.
Методика определения радиолокационной девиации также во многом сходна с определением радиодевиации радиопеленгатора визуальным способом.
Практически могут использоваться два метода определения РЛД:
— при ориентации изображения пеленгуемого объекта на экране ИКО «По курсу» (относительно диаметральной плоскости судна)
В первом случае одновременно берутся отсчеты курсового угла по азимутальному кругу компаса на объект наблюдения и отсчеты радиолокационного курсового угла по азимутальному кругу индикатора кругового обзора.
В качестве объекта визуального и радиолокационного пеленгования следует использовать точечный объект (например, буй, снабженный уголковым отражателем), радиолокационный маяк-ответчик (RACON) и пр. При выборе расстояния между судном, определяющим РЛД, и объектом следует обеспечить хорошую визуальную видимость и чёткое и ясное изображение пеленгуемого объекта на экране ИКО.
Выбор шкалы дальности необходимо производить таким образом, чтобы изображение метки пеленгуемого объекта находилось ближе к краю экрана ЭЛТ.
В связи с тем, что при ориентации ИКО «По курсу» изменение курсового угла вызывает перемещение отметки объекта на экране, определение РЛД следует проводить, ложась на отдельные курсы через 5 — 10°.
 По полученным результатам наблюдений вычисляют РЛД , пользуясь формулой (11.3), и вычерчивают кривую F = f (q) (рис. 11.20).
По полученным результатам наблюдений вычисляют РЛД , пользуясь формулой (11.3), и вычерчивают кривую F = f (q) (рис. 11.20).
— при ориентации «По норду» (истинному меридиану).При ориентации изображения на экране ИКО «По норду» одновременно сравниваются истинные пеленги на объект и радиолокационные пеленги, отсчитываемые на экране индикатора РЛС.
В связи с тем, что при ориентации «По норду» положение отметки неподвижного объекта на экране ИКО не изменяется, опреде-
лять РЛД можно на медленной циркуляции судна (время полной циркуляции должно быть не менее 30 мин.).
По полученным данным вычисляют РЛД по формуле:
F = ИП – РЛП,
где ИП – истинный пеленг, град;
РЛП – радиолокационный пеленг. Град.
Перед производством девиационных работ весь такелаж на судне необходимо закрепить «по-походному», проверить и отрегулировать РЛС.
9.3 СОБЛЮДЕНИЕ ТЕХНИКИ БЕЗОПАСНОСТИ ПРИ ЭКСПЛУАТАЦИИ
СУДОВЫХ РЛС
В приборах и блоках судовых РЛС имеются высокие напряжения, поэтому при эксплуатации, обслуживанию и при работе с ними необходимо пунктуально соблюдать правила техники безопасности и предосторожности.
Особую осторожность следует соблюдать при работе с приёмо-передатчиками и индикаторами.
Нужно помнить: что излучаемая антенной сверхвысокочастотная энергия опасна для здоровья человека, особенно длительное её воздействие, поэтому необходимо:
-постоянно следить за плотностью соединений секций волноводов; отсутствие щелей в них, через которые может происходить утечка СВЧ энергии;
-при якорных, швартовых и других палубных работах (особенно на баке) необходимо отключить вращение антенны, снять высокое напряжение или выключить станцию.
При проведении осмотров, регламентных и других работ с приборами радиолокационной станции необходимо полностью отключить станцию. Последовательность и порядок действий при отключении РЛС должен строго соответствовать инструкции по эксплуатации.
Необходимо обратить внимание на отключение напряжения питания от лага и гирокомпаса.
При работе с антенно-поворотным устройством (прибором А) необходимо выполнить следующие операции:
а) отключить вращение антенны на приборе А;
б) на прибор И (Индикатор) повесить табличку «НЕ ВКЛЮЧАТЬ, РАБОТАЮТ ЛЮДИ»;
в) выключить питание двигателя привода антенны в приборе А для предотвращения несчастных случаев.
После окончания работ выключатели необходимо установить в рабочее положение в обратной последовательности и снять предупреждающую табличку с прибора И.
При регулировочных работах с аппаратурой под напряжением необходимо:
а) производить работы обязательно в присутствии второго лица, стоя на резиновом коврике, производить операцию одной рукой;
б) соблюдать особую предосторожность при работе с приборами П и И, так как в них имеются высокие напряжения.
Запрещается заменять предохранители при включенной РЛС.
Недопустимо устанавливать предохранители не соответствующие требуемому номиналу, особенно, на большой ток.
При работе с аппаратурой в открытом виде и с включенным высоким напряжением необходимо вывешивать предупреждение: «ОСТОРОЖНО, ВЫСОКОЕ НАПРЯЖЕНИЕ!»
Категорически запрещается эксплуатация приборов станции с открытыми крышками.
Обслуживающий персонал должен знать правила оказания помощи пострадавшему от поражения электрическим током.
Статьи к прочтению:
✅Как собрать сварочный аппарат за 15 минут. Сварка на соляном растворе
Похожие статьи:
-
Основные принципы построения операционных систем Краткое описание каждого принципа. ОС различаются по назначению, выполняемым функциям, формам…
-
При выполнении задания рекомендуется следующее.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ ЛАБОРАТОРНОЙ РАБОТЫ № 1 «РАБОТА В ПРИЛОЖЕНИИ MS WORD 2007 – 2013» Составил: старший преподаватель каф. ИСЭ С.Ю….