
Программирование линейных перемещений
Взависимости от нанесения размеров на чертеже детали и последовательности обработки, линейные перемещения могут быть заданы в абсолютной или относительной системах.
Перемещение по оси X в абсолютной системе задается адресом X и координатой конечной точки пути относительно нулевой точки (нуля детали). Координаты в абсолютной системе по оси X задаются в диаметрах.
Перемещение по оси X в относительной системе задается адресом V.
Перемещение по оси Z в абсолютной системе задаются адресом Z и координатой конечной точки пути с ее знаком относительно нулевой точки.
Перемещение по оси Z в относительной системе задается по адресу W. Числовое значение перемещения равно приращению координат соседних опорных точек (Z2- Z1).
Направление движения в обеих системах определяется соответствующим знаком.
В абсолютной системе ставится знак координаты, в которую происходит перемещение. В относительной системе перед числовым значением ставится знак минус, если перемещение происходит в сторону противоположную положительному направлению.
Например, перемещение резца до точки с координатами:
X = 40 мм, Z = 30 мм (рис. 2) в абсолютной системе записывается кадром:
N008 Z30*
в относительной системе – кадром:
N008 W — 51 *.
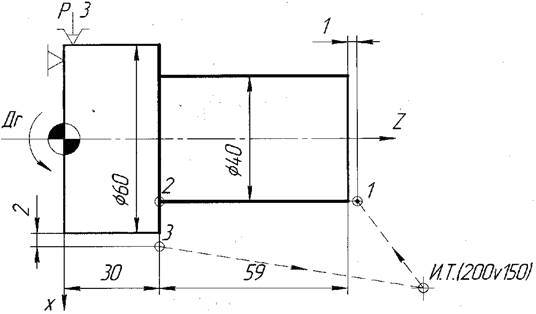
Рисунок 1 — Эскиз валика для иллюстрации программирования линейных перемещений в абсолютной и относительной системах.
Управляющая программа с линейными перемещениями, записанными в абсолютной системе S=0,3 мм/об, n=500 мин-1 (рис. 1), приведена ниже:
N001 S2500 F0,3 T1* Второй диапазон, n=500 /мин -1, S =0,3 мм/об;
резцедержатель в первой позиции
N002 Х40 Z90 E* Подход резца к н. т. на быстром ходу
N003 Z 30* Точение диаметра 40 мм на рабочей подаче
N004 Х64* Точение торца до диаметра 64 мм.
N005 М02* Конец программы (останов вращения, отвод
резца на быстром ходу в исходное положение
сначала по оси X, затем по оси Z).
Управляющая программа с линейными перемещениями, записанными в относительной системе S=0,3 мм/об, n=500 мин-1 (рис. 1):
N001 S2500 F0,3 T1* Второй диапазон, n=500 мин -1, S =0,3 мм/об;
резцедержатель в первой позиции
N002 U-160 W-60 E* Подход резца к н. т. на быстром ходу
N003 W- 60* Точение диаметра 40 мм на рабочей подаче
N004 U24* Точение торца до диаметра 64 мм.
N005 М02* Конец программы (останов вращения, отвод
резца на быстром ходу в исходное положение
сначала по оси X, затем по оси Z).
5. ПРОГРАММИРОВАНИЕ ОБРАБОТКИ КОНИЧЕСКИХ ПОВЕРХНОСТЕЙ И СНЯТИЯ ФАСОК ПОД УГЛОМ 450.
При программировании обработки конических поверхностей линейные перемещения по осям X и Z задают в одном кадре.
Если вершина резца имеет закругление, то при переходе от цилиндрической поверхности к конической по осям X и Z выполняется коррекция на координаты конечной опорной точки.
Операцию снятия фаски под углом 450 задают кадром, в котором указывают следующие данные:
— координату, по которой идет обработка детали (X или Z);
— числовое значение координаты конечной точки перемещения со знаком, указывающим направление перемещения;
— адрес С и число, определяющее величину фаски. Знак перед числом под адресом С соответствует знаку обработки по координате X. Направление по координате Z задают только со знаком минус.
 Примеры программирования снятия фасок приведены на рис. 2.
Примеры программирования снятия фасок приведены на рис. 2.
Рисунок 2 — Пример записи в кадрах УП обработки фасок при наружном точении: 1 — движение, предшествующее обработке фасок; 2 — направление движения по оси X при обработке фаски.
Статьи к прочтению:
Стандарт C++11/14: вывод типов и move семантика
Похожие статьи:
-
Постановка зaдaчи линейного программирования
В последние годы мы особенно отчетливо ощутили, что нет ничего важнее для общества, чем здоровая экономика Научное исследование основ функционирования…
-
Программирование алгоритмов линейной структуры
Лабораторная работа №1 Введение в язык Паскаль Контрольные вопросы: 1. Что такое алгоритмический язык? 2. Какие языки программирования вы знаете? 3….