
Программирование плк momentum. исследование работы п-, пи- и пид-законов регулирования.
Цель работы: овладение навыками программирования ПЛК Momentum фирмы Schneider Electric с помощью инструментальной среды Concept; экспериментальное исследование работы функционального блока, реализующего ПИД-закон регулирования.
Теоретические сведения:
ПЛК Momentum производится фирмой Schneider Electric и представляют собой семейство микропроцессорных технических средств, предназначенных для построения автоматизированных систем управления технологическими процессами. Модульный принцип построения позволяет реализовывать на базе ПЛК Momentum как простые системы управления, включающие небольшое количество точек ввода/вывода, так и сложные системы, обрабатывающие большие объемы информации.
При построении систем автоматического управления программно-технический комплекс Momentum включает четыре основных компонента:
— процессорные адаптеры – осуществляют непосредственную обработку данных на основе заложенных алгоритмов функционирования;
— коммуникационные адаптеры – обеспечивают информационный обмен данными с другими техническими средствами по специализированным протоколам связи;
— базовые модули ввода/вывода – обеспечивают непосредственный прием и первичную обработку данных от датчиков технологической информации, обеспечивают обмен данными с процессорным модулем, а также преобразуют управляющие команды процессорного модуля в электрические сигналы управления исполнительными устройствами;
— дополнительные адаптеры работают совместно с процессорными модулями и модулями ввода/вывода и реализуют дополнительные сетевые функции и дополнительное питание модулей.
Фирмой Schneider Electric выпускается широкая номенклатура модулей, относящихся к каждому из перечисленных компонент программно-технического комплекса Momentum.
Программирование ПЛК Momentum осуществляется в специализированной инструментальной среде Concept.
Разработка прикладного программного обеспечения в среде Concept условно можно разбить на 4 этапа:
1. Создание нового проекта.
2. Конфигурирование ПЛК.
3. Разработка прикладной программы.
4. Загрузка и отладка прикладной программы.
В данной лабораторной работе в полной мере представлены все этапы разработки прикладных программ на примере разработки и исследования характеристик одного контура регулирования, реализующего П-, ПИ- и ПИД- законы регулирования.
Порядок выполнения работы:
1. Запустите инструментальную среду программирования Concept. Для этого в операционной системе Windows активируйте опцию Concept через меню «Start» («Пуск») ® «Programs» («Программы») ® Concept V2.5 XL EN. Откроется пустое окно управления проектами.
2. Создайте новый проект путем активации команды «New project» («Новый проект») в меню «File» («Файл»). Появится окно конфигурации ПЛК («PLC configuration»), в левой части которого располагается список операций, предназначенных для конфигурирования ПЛК, а в правой части указывается тип выбранного ПЛК и его краткие характеристики. В левом нижнем углу окна конфигурации ПЛК расположена кнопка «Open dialog» («Открыть диалоговое окно»). Эта кнопка выделена серым цветом и не неактивная, так как не выбран тип используемого контроллера. Чтобы активировать кнопку «Open dialog» необходимо навести курсор мыши на строку «PLC Selection» («Выбор ПЛК») и нажать ЛК мыши. Теперь кнопка «Open dialog» стала активной и можно приступать к выбору ПЛК.
3. Нажмите кнопку «Open dialog» для задания типа ПЛК. Появится диалоговое окно «PLC Selection» («Выбор ПЛК»). В верхней части этого диалогового окна расположен выпадающий список «PLC Family» («Семейство ПЛК»), в котором выберите линейку программируемых контроллеров Momentum. Ниже в поле «CPU/Executive» расположен список процессорных модулей, в котором выберите тип процессора 171 CCC 980 30-IEC. В остальных полях диалогового окна «PLC Selection» приводится краткая информация для выбранного процессорного модуля, поэтому их необходимо оставить без изменений. На этом выбор ПЛК завершен. Нажмите кнопку «ОК» для подтверждения выбора ПЛК.
4. После того, как будет задан тип ПЛК, окно конфигурации ПЛК изменится: в левой части окна пополнится список доступных операций по конфигурированию контроллера, а в правой будут отображаться характеристики выбранного процессорного модуля 171 CCC 980 30-IEC.
5. На следующем этапе программирования контроллеров в среде Concept необходимо определить память ПЛК, в которой будут храниться входные и выходные данные используемых модулей ввода/вывода. Для этого в левой части окна в списке операций по конфигурированию контроллера выделите строку «I/O Map» («Карта ввода/вывода») и нажмите на кнопку «Open dialog» под списком. Откроется диалоговое окно «I/O Map», содержащее табличку, в которой указываются используемые модули ввода/вывода и последовательность их подключения к ПЛК. Чтобы задать необходимый модуль ввода/вывода необходимо нажать на кнопку «…», которая находится под ячейкой «Edit» («Редактировать»). Появится диалоговое окно «Local Momentum Drop» («Область памяти, зарезервированная под Momentum»), содержащее таблицу, в которой задается тип используемого модуля ввода/вывода и область памяти, зарезервированная под переменные ввода/выхода. Для выбора типа используемого модуля ввода/вывода активируйте кнопку «…» под ячейкой «Module». Появится диалоговое окно «I/O Module Selection» («Выбор модуля ввода/вывода»), которое содержит два списка. В одном списке отображается перечень категорий («Category»), по которым классифицируются модули ввода/вывода, а во втором («Modules») приводится номенклатура доступных модулей ввода/вывода, относящихся к данной категории. В списке категорий выделите «Analog Mixed» («Смешанный аналоговый ввод/вывод» — имеет как входные, так и выходные каналы) и в поле «Modules» выберите модуль 170-AMM-090-00 (данный модуль имеет 4 аналоговых входа, 2 аналоговых выхода, 4 дискретных входа и 2 дискретных выхода). Нажмите кнопку «ОК» для подтверждения выбора. После того, как будет задан модуль ввода/вывода, его тип будет указан в окне «Local Momentum Drop» под ячейкой «Module».
Теперь необходимо задать область памяти, в которой будут храниться входные и выходные данные. Для этого в поле под ячейкой «In Ref» («Ссылка на входные переменные») укажите начальный адрес 300001. Начиная с этого адреса, среда программирования Concept автоматически зарезервирует область памяти для хранения всех входных переменных. Так, модуль 170-AMM-090-00 имеет 4 аналоговых входа, и 4 дискретных входа, поэтому для хранения входных данных будут выделены регистры 300001, 300002, 300003 и 300004 для хранения данных, поступающих с аналоговых входов, и регистр 300005 для хранения данных, поступающих с дискретных входов (так как регистры 16-разрядные, а для хранения дискретной переменной достаточно 1 разряда). В поле под ячейкой «Out Ref» («Ссылка на выходные переменные») необходимо задать начальный адрес 400001 для хранения конфигурационных параметров и значений выходных переменных. Начиная с этого адреса, среда программирования Concept автоматически зарезервирует область памяти для хранения всех выходных переменных. Причем в первом регистре (с адресом 400001) хранятся конфигурационные параметры аналоговых входов, в регистре с адресом 400002 хранятся конфигурационные параметры аналоговых выходов, в регистрах с адресами 400003 и 400004 хранятся текущие значения аналоговых выходов, а в регистре 4000005 хранятся текущие значения дискретных выходов. Всего для хранения аналоговых и дискретных данных модуля 170-AMM-090-00 отводится 5 16-разрядных регистров для входных значений и 5 16-разрядных регистров для выходных значений. Эти регистры могут использоваться только для хранения входных и выходных данных модуля 170-AMM-090-00. Никакая другая информация не может быть записана в эти регистры. Конечные адреса регистров хранения входных/выходных данных задаются автоматически.
После выбора регистров для хранения входных и выходных данных, в окне «Local Momentum Drop» станет активной кнопка «Params» («Параметры»), которая находится в верхнем правом углу окна в поле «Module» («Модуль»). Нажмите на эту кнопку. Появится окно конфигурации модуля ввода/вывода 170-AMM-090-00, в котором настраивается каждый канал ввода/вывода. В левой части окна расположено поле «Input Selection» («Выбор входных каналов»), в котором указаны входные каналы («Channel 1»… «Channel 4»), а в выпадающем списке меню напротив каждого канала можно задать один из возможных режимов работы этого канала:
— «Disable» («Выключен») для отключения канала;
— «1..5V or 4..20mA» («Входной сигнал напряжения в диапазоне 1…5 В или входной сигнал тока в диапазоне 4…20 мА»);
— «+/- 5V or +/- 20mA» («Входной сигнал напряжения с диапазоном -5 В …+5 В или тока с диапазоном -20 мА … +20 мА»);
— «-10V To +10V» («Входной сигнал напряжения в диапазоне от -10 В до +10 В»).
Настройте каналы 1 и 2 («Channel 1» и «Channel 2») на работу с двухполярными сигналами напряжения в диапазоне от -10 В до +10 В.
В правой части окна конфигурирования модуля ввода/вывода 170-AMM-090-00 расположено поле «Output Selection» («Выбор выходных каналов»), в котором указаны выходные каналы («Channel 1 Output» и «Channel 2 Output»), а в выпадающем списке меню напротив каждого канала можно задать один из возможных режимов работы этого канала:
— «Disable» («Выключен») отключения канала;
— «+0mA To +20mA» («Выходной сигнал тока в диапазоне 0…20 мА»);
— «-10V To +10V» («Выходной сигнал напряжения в диапазоне от -10 В до +10 В»).
Настройте выходной канал 1 («Channel 1 Output») на работу с двухполярными сигналами напряжения в диапазоне от -10 В до +10 В.
Нажмите кнопку «ОК» для подтверждения выбора каналов.
Чтобы принять выделенную область памяти для хранения входных/выходных данных, необходимо нажать кнопку «ОК» в окне «Local Momentum Drop» и затем в окне «I/O Map».
6. На следующем этапе составляется прикладная программа. Для этого необходимо открыть окно редактора прикладных программ. Активируйте команду «New Section…» («Новая секция…») в меню «File» («Файл»). Появится диалоговое окно, в котором необходимо выбрать язык программирования и указать имя программы (в строке «Section name»). В качестве языка программирования задайте «FBD» («Язык функциональных блоков»). В строке «Section name» введите номер группы. Нажмите кнопку «ОК». При этом откроется окно, предназначенное для составления и редактирования прикладных программ на языке FBD.
Составьте программу для исследования работы функционального блока, реализующего ПИД-закон регулирования, в соответствии с блок-схемой, приведенной на рис. 1.
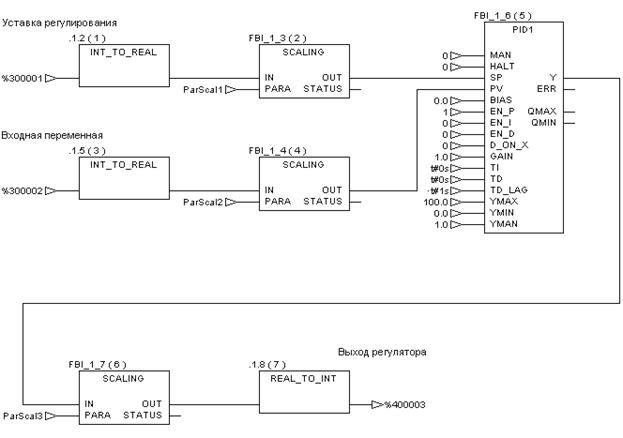
Рис. 1. Блок-схема прикладной программы для исследования функционального блока, реализующего ПИД-закон регулирования.
Описание работы программы.
Входная переменная подключается к каналу 1 («Channel 1» — адрес входного регистра 300001). Сигнал от задатчика (заданное значение регулируемого параметра) подключен к каналу 2 («Channel 2» — адрес входного регистра 300002). Модуль аналогового ввода преобразует сигналы напряжения, подводимые к каналам 1 и 2, в целочисленные значения (формат Integer), пропорциональные уровню входного сигнала, и хранит их во входных регистрах (в данном случае в регистрах 300001 и 300002). Однако функциональный блок PID1 может работать только с вещественными данными (формат Real). Поэтому входные целочисленные значения, хранящиеся в регистрах 300001 и 300002, должны быть преобразованы в формат вещественного числа. Для этого используются функциональные блоки INT_TO_REAL. Функциональные блоки SCALING обеспечивают масштабирование сигналов. В частности, с помощью данного блока задается диапазон изменения входного сигнала в процентах от 0 до 100 %. Далее масштабированные сигналы подаются на входы SP (уставка регулирования) и PV (регулируемая переменная) функционального блока PID1, который реализует ПИД-закон регулирования. Выходное воздействие блока PID1 формируется на выходе Y и имеет формат вещественного числа (Real) с диапазоном изменения от 0 до 100 %. Поэтому перед записью управляющего воздействия ПИД-регулятора в выходной регистр 400003 его сначала масштабируют (блок SCALING), а затем преобразуют в формат целого числа (блок REAL_TO_INT).
Составление прикладной программы на языке FBD в среде программирования Concept осуществляется в следующей последовательности. На панели инструментов редактора прикладных программ активируйте значок  («Показать диалоговое окно выбора функциональных блоков»). Откроется диалоговое окно «Select FFB» («Выбор функциональных блоков). Если откроется диалоговое окно «FFBs from Library …», нажмите кнопку «FFB sorted…» для перехода в диалоговое окно «Select FFB». В выпадающем списке поля «Library» («Библиотеки») выберите «all» («все библиотеки»), при этом в списке доступных функциональных блоков будет показан перечень всех существующих библиотечных блоков. Выберите из списка блок INT_TO_REAL (имя этого блока должно отобразиться в строке FFB над списком) и нажмите кнопку «Close». Переместите курсор мыши в ту область экрана редактора прикладных программ, куда хотите поместить выбранный функциональный блок, и нажмите ЛК мыши. В окне редактора прикладных программ появится блок INT_TO_REAL. Чтобы вход блока INT_TO_REAL получал данные из входного регистра (чтобы соединить вход блока со входами модуля ввода/вывода), активируйте на панели инструментов значок
(«Показать диалоговое окно выбора функциональных блоков»). Откроется диалоговое окно «Select FFB» («Выбор функциональных блоков). Если откроется диалоговое окно «FFBs from Library …», нажмите кнопку «FFB sorted…» для перехода в диалоговое окно «Select FFB». В выпадающем списке поля «Library» («Библиотеки») выберите «all» («все библиотеки»), при этом в списке доступных функциональных блоков будет показан перечень всех существующих библиотечных блоков. Выберите из списка блок INT_TO_REAL (имя этого блока должно отобразиться в строке FFB над списком) и нажмите кнопку «Close». Переместите курсор мыши в ту область экрана редактора прикладных программ, куда хотите поместить выбранный функциональный блок, и нажмите ЛК мыши. В окне редактора прикладных программ появится блок INT_TO_REAL. Чтобы вход блока INT_TO_REAL получал данные из входного регистра (чтобы соединить вход блока со входами модуля ввода/вывода), активируйте на панели инструментов значок  и дважды щелкните ЛК мыши по входу функционального блока INT_TO_REAL. Появится диалоговое окно «Connect FFB: …» («Соединить функциональный блок: …»). В поле «connect with» («соединить с») выберите «Direct address» («Непосредственный адрес») и в строке «Address» («Адрес») укажите адрес регистра входной переменной (в частности, 300001 или 300002).
и дважды щелкните ЛК мыши по входу функционального блока INT_TO_REAL. Появится диалоговое окно «Connect FFB: …» («Соединить функциональный блок: …»). В поле «connect with» («соединить с») выберите «Direct address» («Непосредственный адрес») и в строке «Address» («Адрес») укажите адрес регистра входной переменной (в частности, 300001 или 300002).
Затем снова на панели инструментов активируйте значок («Показать диалоговое окно выбора функциональных блоков») и в диалоговом окне выберите функциональный блок SCALING (Масштабирование). Нажмите кнопку «Close» («Закрыть») и вставьте функциональные блоки SCALING в соответствующих местах экрана редактора прикладных программ. Чтобы соединить вход IN функционального блока SCALING с выходом блока INT_TO_REAL необходимо на панели инструментов активировать значок  (соединение). Переместите курсор мыши на выход функционального блока INT_TO_REAL, нажмите ЛК мыши и, удерживая ее в нажатом состоянии, переместите курсор мыши на вход IN блока SCALING. После этого отпустите кнопку мыши. В результате выход блока INT_TO_REAL будет подключен ко входу блока SCALING. Параметры масштабирования блока SCALING задаются при настройке входа PARA. С этой целью щелкните два раза ЛК мыши по входу PARA. Появится диалоговое окно «Connect FFB: …» («Соединить функциональный блок: …»). В поле «connect with» («соединить с») выберите «Variable» («Переменная») и нажмите кнопку «Variable declaration…» («Объявление переменной…»). Откроется диалоговое окно «Variable Editor» («Редактор переменных»), в котором содержится таблица объявления переменных. Чтобы задать имя переменной необходимо в пустой ячейке таблицы объявления переменных написать имя объявляемой переменной, при этом колонка «Data Type» («Тип данных») заполняется автоматически. Чтобы задать диапазоны изменения входных и выходных значений блока SCALING, необходимо в строке редактируемой переменной в колонке «InitValue» («Начальное значение») нажать кнопку «Set…» («Настроить…»). Появится диалоговое окно «Definition Para_SCALING» («Определение переменной типа Para_SCALING»), в котором содержится таблица настройки редактируемого параметра. В колонке «Value» («Значение») необходимо ввести следующие значения:
(соединение). Переместите курсор мыши на выход функционального блока INT_TO_REAL, нажмите ЛК мыши и, удерживая ее в нажатом состоянии, переместите курсор мыши на вход IN блока SCALING. После этого отпустите кнопку мыши. В результате выход блока INT_TO_REAL будет подключен ко входу блока SCALING. Параметры масштабирования блока SCALING задаются при настройке входа PARA. С этой целью щелкните два раза ЛК мыши по входу PARA. Появится диалоговое окно «Connect FFB: …» («Соединить функциональный блок: …»). В поле «connect with» («соединить с») выберите «Variable» («Переменная») и нажмите кнопку «Variable declaration…» («Объявление переменной…»). Откроется диалоговое окно «Variable Editor» («Редактор переменных»), в котором содержится таблица объявления переменных. Чтобы задать имя переменной необходимо в пустой ячейке таблицы объявления переменных написать имя объявляемой переменной, при этом колонка «Data Type» («Тип данных») заполняется автоматически. Чтобы задать диапазоны изменения входных и выходных значений блока SCALING, необходимо в строке редактируемой переменной в колонке «InitValue» («Начальное значение») нажать кнопку «Set…» («Настроить…»). Появится диалоговое окно «Definition Para_SCALING» («Определение переменной типа Para_SCALING»), в котором содержится таблица настройки редактируемого параметра. В колонке «Value» («Значение») необходимо ввести следующие значения:
— в строке «in_min» («минимальное значение входа») – 0.0;
— в строке «in_max» («максимальное значение входа») – 32000.0;
— в строке «out_min» («минимальное значение выхода») – 0.0;
— в строке «out _max» («максимальное значение выхода») – 100.0;
— значение в строке «clip» оставьте без изменения.
Нажмите кнопку «ОК» («Принять») в диалоговых окнах «Definition Para_SCALING», «Variable Editor» и «Connect FFB: …», если принимаете параметры редактируемой переменной, или «Cancel» («Отмена») в противном случае. В результате будет выполнено конфигурирование функционального блока SCALING.
Чтобы функциональный блок PID1 реализовал заложенный алгоритм регулирования, необходимо задать настроечные параметры этого блока. Настройка работы функционального блока PID1 осуществляется путем подачи управляющих сигналов на соответствующие входы блока. В табл. 1 представлен перечень настроечных параметров, которые необходимо установить на соответствующих входах блока PID1.
Таблица 1. Настройки функционального блока PID1.
| Параметр | Тип данных | Описание | Устанавливаемое значение |
| MAN | Булевый | «1» переводит блок PID1 в ручной режим управления, «0» — в автоматический. | |
| HALT | Булевый | «1» останавливает работу блока PID1 (выход управления не изменяется), «0» — разрешает формировать выходное управляющее воздействие. | |
| SP | Вещественный | Заданное значение параметра регулирования | Сигнал от задатчика |
| PV | Вещественный | Текущее значение регулируемого параметра. | Сигнал от датчика |
| BIAS | Вещественный | Настройка чувствительности блока PID1 на отклонение регулируемой величины от заданного значения. | 0.0 |
| EN_P | Булевый | «1» разрешает формировать П-составляющую закона регулирования, «0» — отключает П-составляющую. | |
| EN_I | Булевый | «1» разрешает формировать И-составляющую закона регулирования, «0» — отключает И-составляющую. | 0 – при исследовании П закона регулирования, 1 – при исследовании ПИ и ПИД законов регулирования |
| EN_D | Булевый | «1» разрешает формировать Д-составляющую закона регулирования, «0» — отключает Д-составляющую. | 0 – при исследовании П и ПИ законов регулирования, 1 – при исследовании ПИД закона регулирования |
| D_ON_X | Булевый | При установке в «1» Д составляющая формируется по величине изменения регулируемой переменной, «0» — Д составляющая формируется по величине сигнала рассогласования. | |
| GAIN | Вещественный | Коэффициент пропорциональности. | 1.0 |
| TI | Временной | Время изодрома. | 30 сек. |
| Параметр | Тип данных | Описание | Устанавливаемое значение |
| TD | Временной | Время предварения. | 10 сек. |
| TD_LAG | Временной | Время задержки включения Д составляющей. | 0 сек. |
| YMAX | Вещественный | Максимальное значение, которое может принимать управляющий сигнал на выходе блока PID1. | 100.0 |
| YMIN | Вещественный | Минимальное значение, которое может принимать управляющий сигнал на выходе блока PID1. | 0.0 |
| YMAN | Вещественный | Шаг изменения выходного управляющего воздействия блока PID1 при ручном управлении. | 1.0 |
Чтобы на соответствующем входе блока PID1 установить требуемое значение дважды щелкните левой кнопкой мыши по этому входу. Появится диалоговое окно «Connect FFB: …» («Соединить функциональный блок: …»). В поле «connect with» («соединить с») выберите «Literal» («Заданное значение») и в строке «Value» («Значение») введите необходимое значение. Следует отметить, что данные, имеющие временной тип, необходимо вводить в специальном формате, например, t#30s. Здесь t означает, что вводимые данные имеют временной тип, 30 – соответствует количественной характеристике временной переменной, а s – задает единицы измерения времени, в частности, секунды.
Настройка функционального блока PID1 будет закончена после того, как на всех входах блока будут установлены соответствующие данные.
При этом выход Y блока PID1 будет изменяться в пределах от 0 до 100 % и имеет вещественный тип данных, в то время как в выходной регистр с адресом 400003 необходимо записать целочисленное значение, которое может принимать значения в пределах от 0 до 32767. Поэтому перед записью управляющего значения в выходной регистр их необходимо отмасштабировать, а затем преобразовать тип данных из вещественного в целочисленный.
Масштабирование выхода осуществляется с помощью функционального блока SCALING. Процесс конфигурирования данного блока был рассмотрен выше, поэтому на этом подробно останавливаться не будем. Приведем лишь те данные, которые необходимо установить в блоке SCALING, соединенным с выходом блока PID1.
Откройте диалоговое окно «Definition Para_SCALING» («Определение переменной типа Para_SCALING») и в таблице настройки редактируемого параметра в колонке «Value» («Значение») введите следующие значения:
— в строке «in_min» («минимальное значение входа») – 0.0;
— в строке «in_max» («максимальное значение входа») – 100.0;
— в строке «out_min» («минимальное значение выхода») – 0.0;
— в строке «out _max» («максимальное значение выхода») – 32000.0;
— значение в строке «clip» оставьте без изменения.
Выход функционального блока SCALING соедините со входом функционального блока REAL_TO_INT, предназначенного для преобразования вещественных данных в целочисленные, а выход блока REAL_TO_INT свяжите с выходным регистром, имеющим адрес 400003. Процедуры вставления функциональных блоков, их соединения и привязки к переменным подробно описаны ранее.
7. После того, как прикладная программа будет составлена, необходимо установить связь с контроллером и загрузить программу в ПЛК. С этой целью в меню «Online» («Соединение») активируйте опцию «Connect…» («Подключить…»). Появится диалоговое окно «Connect to PLC» («Подключение к ПЛК»). В списке «Protocol type» («Тип протокола связи») выберите «TCP/IP», а в строке «IP address or DNS host name» («IP адрес или имя главного устройства DNS») введите адрес подключенного контроллера «124.124.124.1». В поле «Access Level» («Уровень доступа») задайте «Change Configuration» («Изменить конфигурацию»). Нажмите кнопку «ОК» для подтверждения ввода данных. После нажатия кнопки «ОК» среда программирования Concept начнет искать в сети устройство с адресом 124.124.124.1. Если контроллер включен и подключен к сети, то через некоторое время соединение будет установлено. Теперь необходимо загрузить созданную прикладную программу в контроллер. Для этого в меню «Online» («Соединение») активируйте опцию «Download…» («Загрузить…»). В появившемся диалоговом окне щелкните ЛК мыши по полю «All» («Все») и нажимаете кнопку «Download…» («Загрузить…»). Если при этом контроллер выполняет какую-либо задачу, появится сообщение «Контроллер запущен. Загрузка прикладной программы вызовет останов работы контроллера. Остановить контроллер?». Нажмите кнопку «ОК» и прикладная программа вместе с конфигурационными данными будет загружена в ПЛК.
8. На следующем этапе необходимо настроить среду программирования Concept так, чтобы в режиме реального времени следить за изменениями в работе контроллера. Для этого выделите все элементы программы (в редакторе прикладной программы одновременно нажмите на клавиатуре клавиши Ctrl+A) и нажмите кнопку  «Read all selected variables» («Читать все выделенные переменные») на панели инструментов редактора прикладных программ. Чтобы просмотреть все Булевы переменные в режиме реального времени на экране персонального компьютера, нажмите кнопку
«Read all selected variables» («Читать все выделенные переменные») на панели инструментов редактора прикладных программ. Чтобы просмотреть все Булевы переменные в режиме реального времени на экране персонального компьютера, нажмите кнопку  «Read all Boolean variables» («Читать все Булевы переменные»). После этого можно будет контролировать все изменения переменных на экране персонального компьютера в окне редактора прикладных программ. Однако такая форма наблюдения за работой блока PID1 неудобна, так как не дает визуального представления о характере изменения значений переменных во времени. Поэтому следить за процессом изменения значений переменных удобно с помощью трендов (временных диаграмм). Чтобы вывести временные диаграммы изменения интересующих параметров дважды щелкните ЛК мыши по функциональному блоку PID1 и в появившемся диалоговом окне «Functional block: PID1» («Функциональный блок: PID1») нажмите кнопку «Advanced…» («Подробно…»). Появится диалоговое окно «Advanced Monitor FBI_X_X – PID1», в котором необходимо отметить те переменные, которые должны отображаться на временных диаграммах. Перечень переменных (входных и выходных) приводится в колонке «Parameter» («Параметр»). В качестве входных переменных, которые будут отображаться на диаграммах, выделите SP и PV, а в качестве выходных — Y. Чтобы выделить переменную, наведите указатель мыши на ячейку, в которой записана эта переменная, и щелкните ЛК мыши. При выделении нескольких переменных необходимо на клавиатуре удерживать нажатой кнопку Ctrl. После того, как необходимые переменные будут отмечены, нажмите на кнопку «Graphics» («Временные диаграммы») в поле «Tools» («Инструменты»). На экране персонального компьютера появится графическая интерпретация процесса изменения выбранных параметров во времени.
«Read all Boolean variables» («Читать все Булевы переменные»). После этого можно будет контролировать все изменения переменных на экране персонального компьютера в окне редактора прикладных программ. Однако такая форма наблюдения за работой блока PID1 неудобна, так как не дает визуального представления о характере изменения значений переменных во времени. Поэтому следить за процессом изменения значений переменных удобно с помощью трендов (временных диаграмм). Чтобы вывести временные диаграммы изменения интересующих параметров дважды щелкните ЛК мыши по функциональному блоку PID1 и в появившемся диалоговом окне «Functional block: PID1» («Функциональный блок: PID1») нажмите кнопку «Advanced…» («Подробно…»). Появится диалоговое окно «Advanced Monitor FBI_X_X – PID1», в котором необходимо отметить те переменные, которые должны отображаться на временных диаграммах. Перечень переменных (входных и выходных) приводится в колонке «Parameter» («Параметр»). В качестве входных переменных, которые будут отображаться на диаграммах, выделите SP и PV, а в качестве выходных — Y. Чтобы выделить переменную, наведите указатель мыши на ячейку, в которой записана эта переменная, и щелкните ЛК мыши. При выделении нескольких переменных необходимо на клавиатуре удерживать нажатой кнопку Ctrl. После того, как необходимые переменные будут отмечены, нажмите на кнопку «Graphics» («Временные диаграммы») в поле «Tools» («Инструменты»). На экране персонального компьютера появится графическая интерпретация процесса изменения выбранных параметров во времени.
После выполнения всех действий, описанных в предыдущих шагах, можно приступать к исследованию характеристик функционального блока PID1, реализующего П, ПИ и ПИД законы регулирования.
9. При исследовании работы П-регулятора необходимо отключить И- и Д-составляющие, то есть на входы EN_I и EN_D должны подаваться 0 (при этом на вход EN_P должна подаваться 1). Перевести регулятор в режим контрольной точки и подождать 20 секунд, чтобы на временной диаграмме сформировался участок, на котором выход регулятора не изменяется. Затем резко изменить значение регулируемой переменной на 20% и в течение 30 секунд следить за тем, как П-регулятор отрабатывает сигнал рассогласования.
10. При исследовании работы ПИ-регулятора необходимо включить И-составляющую алгоритма регулирования и отключить Д-составляющую, то есть на входы EN_I необходимо подать 1, а на EN_D – 0 (при этом на вход EN_P должна подаваться 1). Перевести регулятор в режим контрольной точки и подождать 20 секунд, чтобы на временной диаграмме сформировался участок, на котором выход регулятора не изменяется. Затем резко изменить значение регулируемой переменной на 20% и в течение 30 секунд следить за тем, как ПИ-регулятор отрабатывает сигнал рассогласования.
11. При исследовании работы ПИД-регулятора необходимо включить И- и Д-составляющие, то есть на входы EN_I и EN_D должны подаваться 1 (при этом на вход EN_P должна подаваться 1). Перевести регулятор в режим контрольной точки и подождать 20 секунд, чтобы на временной диаграмме сформировался участок, на котором выход регулятора не изменяется. Затем резко изменить значение регулируемой переменной на 10% и в течение 30 секунд следить за тем, как ПИД-регулятор отрабатывает сигнал рассогласования.
Контрольные вопросы:
1. Перечислите основные этапы разработки прикладных программ в инструментальной среде программирования Concept.
2. Приведите зависимость, реализующую ПИД-закон регулирования.
3. Нарисуйте временную диаграмму отклика отдельно для П-, ПИ- и ПИД-регулятора при ступенчатом изменении задания регулятора.
4. Определите по временной диаграмме реальные настроечные параметры ПИД-регулятора.
Лабораторная работа №3
Статьи к прочтению:
- Программирование плк smart i/o. разработка программы нормального останова газоперекачивающего агрегата в среде isagraf.
- Программирование с использованием массивов
О PID регуляторе простым языком (что такое ПИДы)
Похожие статьи:
-
Цель работы: — изучение контроллеров семейства VersaMax фирмы GE Fanuc; — ознакомление с программным обеспечением CIMPLICITY Machine Edition для…
-
Тема: «исследование работы интегральных триггеров».
Лабораторная работа № 3 Тема: «Исследование работы интегральных триггеров». Цель работы:Исследовать работу синхронных и асинхронных триггеров в…