
Специальные советы по настройке навигации
Предположим что модель отлично стабилизируется, но при движении по маршруту или при возвращении к точке взлета он двигается по змейке или того хуже сдувается с маршрута малейшим ветром. Что делать?
Конкретные советы:
1. Лучший способ проверки точности соблюдения маршрута — задать маршрут по коробочке с максимально возможным расстоянием между точками для того чтобы самолет имел достаточно места для маневра. Помните что изначально радиус точки 20 метров, при вхождении в этот радиус точка считается достигнутой и самолет устремляется к следующей, например если точки поставить так что их радиусы пересекутся, то если самолет одновременно оказывается в радиусах нескольких последовательных точек все они станут достигнуты одновременно. Выбирая дальность точки не переусердствуйте, нужно иметь запас расстояния чтобы вовремя переключить в ручной режим и вернуть самолет если что то пошло не так.
2. Начинать настройку коэффициентов навигации логично при обнуленных NAV_ROLL I, NAV_ROLL D,Crosstrack Gain (предварительно запишите их значения чтобы потом вернуть); В этом случае вы сможете видеть как влияет на полет пропорциональный коэффициент навигации без других факторов.
3. Если навигация не точна первое что следует проверить это коэффициент SERVO_ROLL_P. Вы делали 45-градусный тест fly-by-wire (FBW)? Самолет не сможет нормально двигаться по маршруту если сервоприводы не получают достаточного уровня команд. Выполните Fly-By-Wire тест как описано в абзаце выше.
4. Если SERVO_ROLL_P настроен верно, проверьте NAV_ROLL_P на маршруте коробочка из четырех точек. Если самолет вяло поворачивает — увеличивайте, виляет из стороны в сторону — уменьшайте.
5. Последнее, что нужно сделать, чтобы действительно заставить его следовать маршруту максимально точно, следует подобрать Crosstrack gain. Увеличение этого параметра заставляет самолет не просто следовать между точками, а придерживаться именно линии соединяющей их, например в условиях сноса ветром. Эта диаграмма показывает, как работает crosstrack:
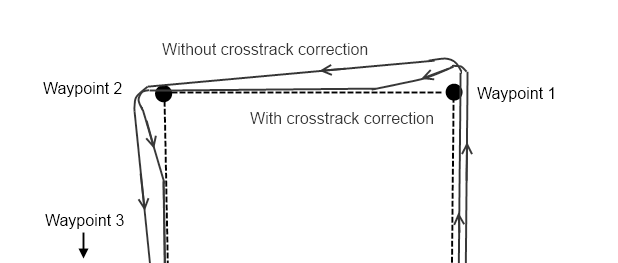
С усилением 0, самолет будет двигаться по красной линии. Если увеличить это значение (100 по умолчанию), полет будет похож на кривую описанную синей линией. Если самолет будет лететь волной около линии маршрута — понизьте коэфициент до значения заданного по умолчанию. Этот коэфициент может быть еще ниже для самолета летающего с большой скоростью. Для исключения коррекции задайте этот коэффициент равным 0.
Интерактивное руководство по настройке Crosstrack тут.
Немного теории о PID
PID может рассматриваться как управление в соответствии с «Прошлое, настоящее, будущее данных.
Пропорциональное усиление (P) является простейшей формой управления, это настоящее ошибки. К примеру автопилот должен достичь 10 градусов тангажа, а имеет 5 градусов, то есть ошибка 5: следует немного приподнять руль высоты. (воздействие — масштабирует уровень ошибки — по значению P). Прошлые данные (I) принимает во внимание последние ошибки. Если пропорциональное усиление не может устранить ошибку в ноль в течении длительного времени, то I усиление будет пытаться это сделать. Будущее (D) (без хрустального шара) экстраполирует текущие ошибки в будущее в течение некоторого короткого периода.
В результате к плоскости управления или газу применяется значение, являющееся суммой этих трех расчетов.
Настройка P, PI или PID значений может улучшить скорость исправления наблюдаемой ошибки между желаемым (высота, скорость, пеленг, что угодно) и фактическим значением быстро и без колебаний.
Лучший способ увидеть PID в действии — проверить в программе-симуляторе полета. Летите прямо и ровно в режиме стабилизации, а затем сильно поднимите нос самолета вверх и отпустите управление. Настройка SERVO_PITCH ПИД-регулятора будет определять качество и надежность управления по стабилизации кабрирования. Оно может быть либо агрессивно, или слишком медленно и, возможно, никогда не достигнет строгого горизнта.I значение может вмешаться, чтобы медленно подтянуть к идеалу. И, наконец, D термин может компенсировать задержки, присущие управлению. Однако, если D является слишком большим, колебания в приводах могут иметь нарастающий характер. Именно поэтому настройка D значения в воздухе, методом проб случайных чисел не рекомендуется.
Использование программного обеспечения Ground Station (наземная станция управления полетом)
Что такое GCS?
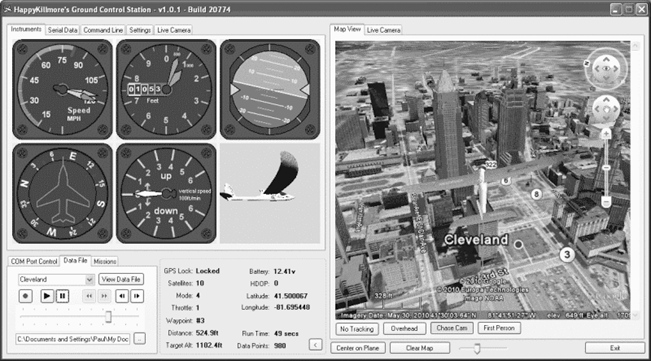
GCS (наземная станция управления полетом, если угодно ЦУП — центр управления полетом) это программное обеспечение запущенное на наземном компьютере, которое соединено с беспилотным летательным аппаратом посредством беспроводного модема. Оно отображает в реальном времени данные о состоянии и позиции полета БПЛА. И может предоставлять возможность отображать визуальные индикаторы и приборную доску, отображение множества приборов создает эффект присутствия в настоящем самолете.
Кроме наблюдения, GCS также может использоваться для управления полетом БПЛА, внесения изменений в маршрут и изменения настроек и часто используется в качестве монитора для наложения видео полученного с камер на борту БПЛА.
Статьи к прочтению:
3-Axis Flight Control
Похожие статьи:
-
Тема: настройка устройств, подключенных к интерфейсу ата
Цель занятий: -знать назначение базовых настроек ПК -уметь производить настройки устройств, подключенных к интерфейсу АТА; -уметь выбирать загрузочные…
-
Основные настройки расчета gi.
СОДЕРЖАНИЕ Введение……………………………………………………………………3 1.Управлящие параметры Vray……………………………………………4 2.Iradiance map …………………………………………………………….12…