
Вопрос 3. блок-схема системы автоматического управления воздухозаборником по величине приведенной скорости вращения ротора авиадвигателя.
Система осуществляет управление конусом (панелями клина) и выпускными створками по программам, представленным на рис. 8.
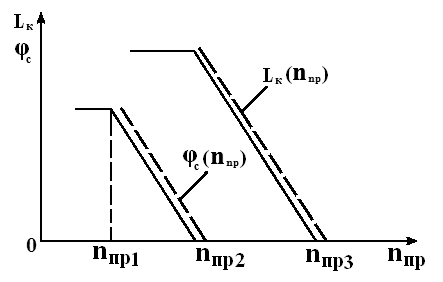
Рис. 8. Программы регулирования lк = f (nпр), ?с = f (nпр)
Перемещение конуса оценивается величиной lк , а открытие выпускных створок — углом ?с, отсчитываемым соответственно от полностью убранного положения конуса и закрытого положения створок.
При значениях приведенной частоты вращения турбокомпрессора, больших nпр з, конус полностью убран (lк = 0) и створки закрыты (?с = 0). С уменьшением nпр до значения nпр 2 конус выпускается, створки закрыты. При nпр = nпр 2 конус полностью выпущен, створки остаются закрытыми. Дальнейшее уменьшение nпр приводит к открытию створок. Когда nпр nпр 1, конус полностью выпущен, створки полностью открыты. С увеличением nпр створки и конус изменяют свое положение в обратном порядке и направлении. Пределы дополнительных перемещений конуса и открытия створок при изменении угла атаки самолета показаны на рисунке 8. штриховыми линиями.
На рис. 9 приведена схема электрогидравлической системы типа ЭСУВ, реализующей программное управление конусом и створками воздухозаборника в зависимости от величины nпр (?пр).
Выходной сигнал датчика приведенной частоты вращения ДПЧ, пропорциональный nпр (?пр), сравнивается с сигналом обратной связи, снимаемым с потенциометров обратной связи конуса (ПОСК) или створок (ПОСС).
Напряжение сигнала рассогласования поступает на вход фазо-чувствительного усилителя ФЧУ и затем — на вход усилителя постоянного тока (УПТ), на выходе которого включено релейно-коммутационное устройство (РКУ). Релейно-коммутационное устройство осуществляет включение соответствующих обмоток элекгрогидрокранов конуса (ЭГК) или створок (ЭГКС). Последние управляет подачей рабочей жидкости в полости сервомеханизмов конуса (СМК) или створок (СМС).
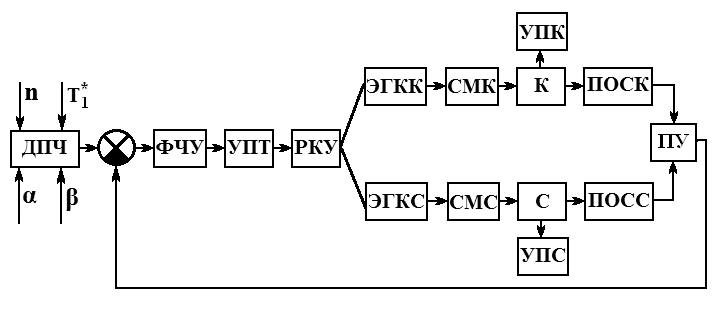
Рис. 9. Структурная схема электрогидравлической системы типа ЭСУВ
Со штоками сервомеханизмов соединены щетки специальных потенциометров, с которых снимаются напряжения на указатели положения конуса (УПК) и створок (УПС). Подключение в мостовую схему датчика приведенной частоты вращения соответствующих потенциометров обратной связи производится с помощью переключающего устройства (ПУ).
Датчик приведенной частоты вращения представляет собой счетно-решающее устройство, принципиальная схема которого изображена на рис.11.
В плечи моста переменного тока включены дроссель Др с индуктивностью L, проволочные термосопротивления RТ1 и RТ2, резисторы R1-R4 , R7- R10 и потенциометры обратной связи R5, R6. В точки 1-2 диагонали моста подключена задающая обмотка Wз тахогенератора, от которой осуществляется питание моста. К точкам 3- 4 второй диагонали моста подключена опорная обмотка WО тахогенератора и первичная обмотка трансформатора Tpl. Тахогенератор представляет собой двухфазный генератор переменного тока с возбуждением от постоянного магнита, ротор которого через редуктор связан с валом компрессора двигателя.
Задающая Wз и опорная Wо обмотка тахогенератора смещены пространственно друг относительно друга так, что вектор напряжения  опережает по фазе вектор напряжения
опережает по фазе вектор напряжения  на угол
на угол  /2, Параметры этих обмоток выбраны таким образом, что
/2, Параметры этих обмоток выбраны таким образом, что  . Напряжение
. Напряжение  на индуктивном сопротивлении дросселя пропорционально частоте напряжения питания и, следовательно, физической частоте вращения компрессора. Напряжение
на индуктивном сопротивлении дросселя пропорционально частоте напряжения питания и, следовательно, физической частоте вращения компрессора. Напряжение  на термосопротивлении зависит от температуры заторможенного потока воздуха на входе в компрессор. Для векторов
на термосопротивлении зависит от температуры заторможенного потока воздуха на входе в компрессор. Для векторов  и
и  всегда выполняется условие
всегда выполняется условие  |
| . Величина и фаза напряжения
. Величина и фаза напряжения  между точками 3-4 моста при фиксированном положении щетки потенциометра обратной связи зависят от соотношения напряжений
между точками 3-4 моста при фиксированном положении щетки потенциометра обратной связи зависят от соотношения напряжений  |
| . Напряжение
. Напряжение  сравнивается с опорным напряжением
сравнивается с опорным напряжением  , а выходное напряжение моста
, а выходное напряжение моста  , равное геометрической сумме
, равное геометрической сумме  +
+ подводится к первичной обмотке трансформатора Tpl
подводится к первичной обмотке трансформатора Tpl
Пусть параметры моста и режим работы авиадвигателя таковы, что выполняется условие  =
= . Тогда векторная диаграмма напряжений в элементах датчика будет иметь вид, представленный на рис. 10,а. Здесь угол между
. Тогда векторная диаграмма напряжений в элементах датчика будет иметь вид, представленный на рис. 10,а. Здесь угол между  и
и  равен
равен  /2, а сами векторы опираются на вектор
/2, а сами векторы опираются на вектор  , как на диаметр окружности (номера точек на диаграмме соответствуют номерам точек на рис. 11). Из диаграммы видно, что
, как на диаметр окружности (номера точек на диаграмме соответствуют номерам точек на рис. 11). Из диаграммы видно, что  =
= +
+ =0
=0
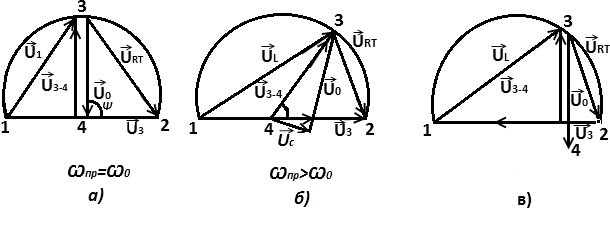
Рис. 10. Диаграммы измерительного моста.
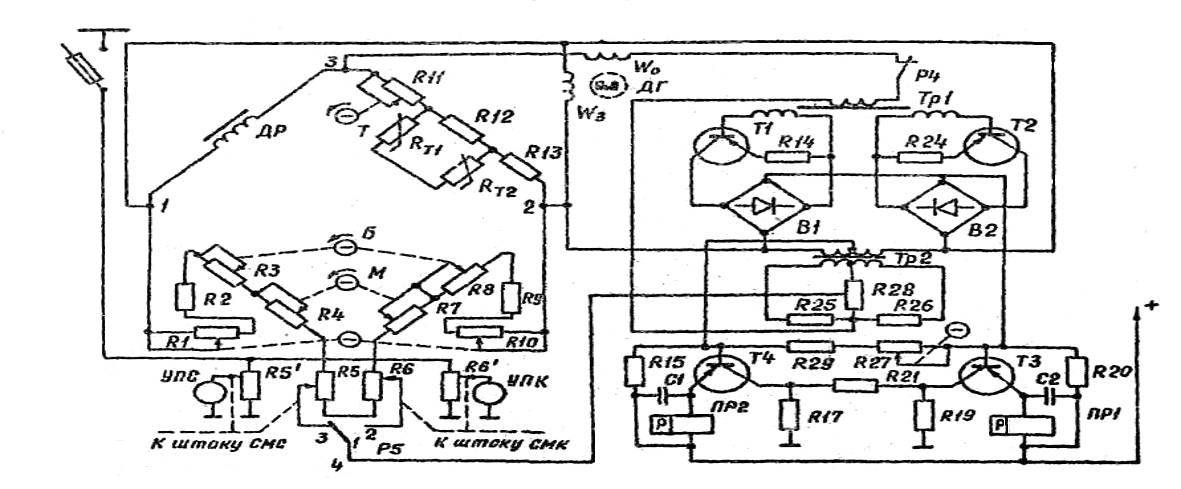
Рис. 11. Принципиальная схема датчика приведенной частоты вращения.
Увеличение частоты вращения компрессора (?ПР?0) приводит к возрастанию индуктивного сопротивления дросселя и, следовательно, к возрастанию напряжения  . Этот процесс отображается смещением точки 3 на векторной диаграмме (рис. 10,б) по полуокружности вправо. Аналогичное смещение точки 3 имеет место при уменьшении температуры заторможенного потока воздуха перед компрессором, когда уменьшаются величины сопротивления Rт и напряжения
. Этот процесс отображается смещением точки 3 на векторной диаграмме (рис. 10,б) по полуокружности вправо. Аналогичное смещение точки 3 имеет место при уменьшении температуры заторможенного потока воздуха перед компрессором, когда уменьшаются величины сопротивления Rт и напряжения  . Таким образом, при увеличении приведенной частоты вращения ?пр фазовый угол ? между векторами напряжений
. Таким образом, при увеличении приведенной частоты вращения ?пр фазовый угол ? между векторами напряжений  , и
, и  становится меньше
становится меньше  /2. В результате на выходе моста появляется напряжение
/2. В результате на выходе моста появляется напряжение  , тангенциальная составляющая которого совпадает по направлению с вектором .
, тангенциальная составляющая которого совпадает по направлению с вектором .
Определение фазы тангенциальной составляющей напряжения  , ее усиление и выпрямление осуществляются фазочувствительным усилителем, выполненным по двухполупериодной схеме на двух транзисторах TI и T2 (рис. 11).
, ее усиление и выпрямление осуществляются фазочувствительным усилителем, выполненным по двухполупериодной схеме на двух транзисторах TI и T2 (рис. 11).
Нагрузкой фазочувствительного усилителя являются последовательно включенные резисторы R27 и R29, напряжение URH которых подается на вход усилителя постоянного тока. Резистор R27 с изменяемым сопротивлением служит для регулирования величины зоны нечувствительности и получения устойчивого режима работы системы.
Дальнейшее усиление напряжения URH происходи с помощью усилителя постоянного тока, собранного по балансной схеме на транзисторах ТЗ и Т4 (рис. 11). Нагрузкой транзисторов являются обмотки двух высокочувствительных поляризованных реле ПР1 и ПР2. При отсутствии напряжения URH транзисторы закрыты и обмотки реле отключены.
При увеличении приведенной частоты вращения полярность напряжения URH на выходе фазочувствительного усилителя такова, что открыт транзистор ТЗ и обмотка реле ПР1 находится под напряжением. С уменьшением приведенной частоты вращения открывается транзистор Т4 и под напряжением оказывается обмотка реле ПР2. Поляризованные реле управляют включением сервомеханизмов, которые перемещают конус (створки) и щетки потенциометров R6 или R5. Таким образом, точка 4 на векторной диаграмме рис. 10 перемещается в сторону уменьшения величины сигнала  , т.е. в рассматриваемом случае вправо. Для нового равновесного состояния векторная диаграмма имеет вид, показанный на рис. 10,в. Оставшаяся составляющая напряжения
, т.е. в рассматриваемом случае вправо. Для нового равновесного состояния векторная диаграмма имеет вид, показанный на рис. 10,в. Оставшаяся составляющая напряжения  —
— 0 перпендикулярна вектору и поэтому не оказывает влияния на работу системы.
0 перпендикулярна вектору и поэтому не оказывает влияния на работу системы.
При уменьшении приведенной частоты вращения (?ПР?0) точка 3 на векторной диаграмме смещается по полуокружности влево и фазовый угол ? между векторами и  становится больше /2. В этом случае тангенциальная составляющая напряжения
становится больше /2. В этом случае тангенциальная составляющая напряжения  на выходе моста находится в противофазе с вектором
на выходе моста находится в противофазе с вектором  .
.
Вывод: система автоматического управления воздухозаборником по величине приведенной скорости вращения ротора авиадвигателяосуществляет управление конусом (панелями клина) и выпускными створками.Перемещение конуса оценивается величиной lк , а открытие выпускных створок — углом ?с, отсчитываемым соответственно от полностью убранного положения конуса и закрытого положения створок.
Заключение
На сверхзвуковых скоростях полета увеличение давления воздуха перед поступлением его в камеру сгорания осуществляется не только в компрессоре, но и во входном устройстве в результате преобразования кинетической энергии набегающего потока воздуха в потенциальную энергию давления.
Системы управления входными устройствами предназначены для регулирования их пропускной способности с помощью регулирующих органов (конуса, панелей клина, выпускных створок). Выпуск конуса или панелей клина и открытие выпускных створок приводит к уменьшению пропускной способности ВУ.
Управление в большинстве случаев осуществляется по программам, представляющим собой зависимости координат, определяющих положение регулирующих органов, от параметров, характеризующих потребный расход
воздуха, в двигателе. Потребный расход однозначно связан с величинами
степени повышения давления в компрессоре ?*к и приведенной частоты вращения nпр .
Вопросы для самоконтроля
1 Назначение и классификация входных устройств реактивных двигателей.
2. Способы и программы управления сверхзвуковыми входными устройствами
3. Система автоматического управления всережимным воздухозаборником по величине степени сжатия ?к воздуха в компрессоре.
4. Система автоматического управления воздухозаборником по величине приведенной скорости вращения ротора авиадвигателя.
Литература
1. Под редакцией Е.А. Румянцева, Авиационное оборудование, издание ВВИА им. проф. Н.Е. Жуковского, Москва 1980г., стр. 55…63.
2. В.Д. Константинов, И.Г. Уфимцев, Н.В. Козлов Авиационное оборудование самолетов, военное издательство МО СССР, Москва, 1970г. 340 стр. 110…119.
3. Под редакцией д.т.н., профессора Ю.П. Доброленского, Авиационное оборудование, М. Воениздат, 1989г., стр. 72-76.
4. Под ред. П. И. Чинаева, Авиационное оборудование , М: Воениздат, 1976 г. стр. 183…201.
5. И.М. Синдеев, Электрооборудование летательных аппаратов, Москва, ВИА им. Проф. Н.Е. Жуковского, стр. 340…385.
Статьи к прочтению:
- Вопрос 3. применение примитивов и ссылок в xml-документе
- Вопрос 5. файловая система. особенности концепции
Видеолекция Основы автоматического регулирования и управления
Похожие статьи:
-
Вопрос 47. поисковые системы internet. обычный и расширенный поиск.
Поисковая система — программно-аппаратный комплекс с веб-интерфейсом, предоставляющий возможность поиска информации в Интернете. Под поисковой системой…
-
Вопрос 3. операционные системы
Операционная система является связующим звеном, с одной стороны, между аппаратурой компьютера и выполняемыми программами, с другой стороны, между…