
Датчики динамического позиционирования автомобиля
Эти датчики применяются для систем активной подвески, управления устойчивостью и других систем общего назначения, в которых учитывается движение автомобиля. Большинство таких систем основаны на акселерометрах, то есть используется шарик, подвешенный на пружине, или инерционная масса, действующая на датчик.
Датчики: резюме
Приведенный выше краткий обзор различных датчиков охватывает лишь малую часть огромною разнообразия типов и областей применения датчиков, предназначенных для решения специфических задач. Приборостроение сегодня является самостоятельной областью науки. Общее назначение этого раздела — осветить некоторые из проблем и решений применительно к измерению величин, связанных с конструкцией автомобиля.
Датчики, используемые системами управления двигателем, развиваются в направлении интеграции средств обработки си шала непосредственно внутрь датчика. Рассмотрим четыре таких технических способа, начав с обычной системы. На рис. 2.69 показан блок-схема уровней интеграции датчика.
Обычная система
Аналоговый датчик, в кондом сигнал передается на блок управления двигателем через электрические кепи. Этот способ очень подвержен влиянию помех.
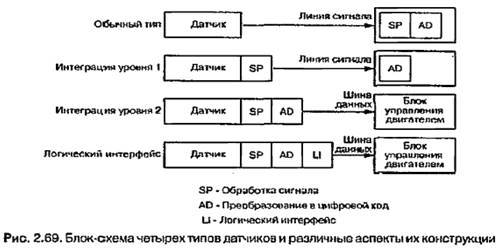
Интеграция уровня 1
Аналоговый сигнал обрабатывается, что улучшает степень помехозащищенности, а затем подастся на блок управления.
Интеграция уровня 2
На втором уровне интеграции о датчик включается аналого-цифровое преобразование. Такой сигнал уже совместим с шиной данных (например, CAN) и, следовательно, становится защищенным от помех.
Интеграция уровня 3
Конечный уровень интеграции состоит в тол», чтобы использовать «интеллект» в виде микрокомпьютера кик составную часть датчика. Цифровой выход датчика будет помехоустойчивым. Этот уровень интеграции также позволяет встроить в датчик способность дистанционного контроля и диагностики. Такие типы датчиков на момент написания книги очень дорога, но со временем их цена упадет, и датчики получат более широкое применение. Со временем все системы автомобиля будут ориентированы на «интеллектуальные датчики».
Приводы: введение
Есть множество способов для управления параметрами внутри и вне автомобиля. Приводы это общий термин, применяемый в книге для описания механизма управления. Электрические приводы работают либо с применением термического, либо магнитного эффекта. В этом разделе термин «привод» будет использован, чтобы обозначить прибор, который преобразует электрические сигналы в механическое движение. Целью раздела не является описание всех возможных типов приводов. Его назначение состоит в том, чтобы описать некоторые
из принципов и технических приемов, используемых в управлении системами автомобиля в широком смысле.
Соленоидные приводы
Основной принцип действия соленоидных приводов очень прост. Термин «соленоид» означает: многовитковая катушка, намотанная на пустую трубку. Этот термин стал настолько распространенным, что зачастую используется неверно, например,
нашло широкое применение выражение типа «соленоид стартера», который в действительности представляет собой пусковое рале.
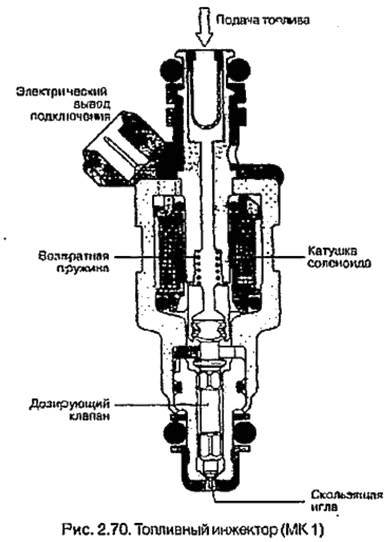
Хороший пример соленоида — инжектор топлива, показанный на рис. 2.70. Когда на обмотки подастся питание, якорь увлекается магнитным полем и сжимает пружину. В случае топливного инжектора это движение ограничивается всего 0,1 мм. Интервал
времени, во время которого инжектор остается открытым, весьма незначителен — обычно в пределах от 1,5 до 10 мс. Это время, требуемое инжектору, чтобы открыться и закрыться, является
очень важным для отмеривания дозы топлива. Дальнейшие подробности по системам впрыска обсуждаются в главах 9 и 10.
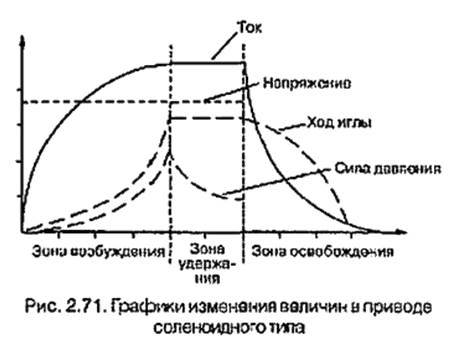
Время реакции для узлов соленоидного принципа действия, таких как инжектор топлива, в значительной степени зависит от индуктивности обмотки. На рис. 2,71 приведены графики изменения различных переменных для привода данного типа.
Формула, описывающая зависимость между этими
переменными, выглядит следующим образом:
где I — мгновенное значение тока в обмотке, V — напряжение источника питания, R —общее сопротивление цепи питания, L – индуктивность обмотки инжектора, t —время от момента начала
импульса тока, е — основание натурального логарифма.
Сопротивление широко применяемых инжекторов составляет около 16 Ом. Некоторые системы применяют балластные резисторы, включаемые последовательно с обмоткой инжектора. Это позволяет уменьшить индуктивность и сопротивление
используемых рабочих обмоток и таким образом уменьшить время срабатывания. Для других типов соленоидных приводов, например, привода замка дверей, время срабатывания менее критично.
Моторные приводы
Электрические моторы с постоянными магнитами используются во многих случаях ввиду своей универсальности.
Выходом мотора является, конечно, вращение, но оно может быть использовано различными способами. Вращение может быть легко преобразовано в линейное перемещение, если электродвигатель
приводит во вращение ходовой винт с гайкой, на которой установлен плунжер. В большинстве случаев использования в автомобиле вращение вала мотора должно быть преобразовано с помощью зубчатой передачи, которая служит для уменьшения скорости и увеличения крутящего момента. Моторы с постоянным магнитом универсальны в применении и в настоящее время используются вместо старых или менее практичных моторов с электромагнитами. Вот несколько типичных примеров, где могут быть использованы подобные моторы:
¦ стеклоочистители ветрового стекла;
¦ омыватели ветрового стекла;
¦ подъемник фар освещения;
¦ стеклоподъемники;
¦ электрифицированный люк крыши;
¦ электрифицированная антенна;
¦ регулировка сидений;
¦ регулировка зеркал;
¦ омыватели передних фар;
¦ стеклоочистители передних фар;
¦ топливные насосы;
¦ вентиляторы.
У простых приводов на основе электромотора есть один недостаток- невозможна прямая обратная связь по положению. Это и не требуется во многих случаях, тем не менее, иногда, например,
при регулировке сидения, может быть необходимо «запомнить» положение, тогда для обеспечения обратной связи может быть установлен датчик типа переменного сопротивления. Типичный
привод этого типа показан на рис. 2.72.

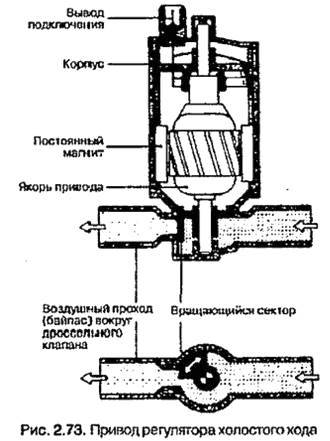
Исполнительный механизм холостого хода показан на рис. 2.73. Этот прибор используется для управления скоростью холостого хода благодаря воздушному обходному каналу. Существует два основных типа устройств общего применения: с одной обмоткой, которые имеют две клеммы, и двойной обмоткой, которые имеют три клеммы. Под управлением блока управления двигателем электромотор должен открывать и закрывать заслонку, регулируя, таким образом, внутреннее сечение обходного канала. Эти исполнительные механизмы поворачиваются на 90% чтобы открывать или закрывать клапан. Поскольку речь идет о моторах
с постоянными магнитами, термины «одиночные» или «сдвоенные» обмотки относятся к якорю.
На механизм с одиночной обмоткой подается импульсное напряжение прямоугольной формы. Преодолевая силу пружины, двигатель сначала приоткрывает заслонку, затем она снова закрывается под действием пружины. Отношение периодов
«включено/выключено», или рабочий цикл (скважность) прямоугольного сигнала, будет определять среднее время открытого состояния клапана и, следовательно, скорость холостого хода.
В приводах с двойной обмоткой напряжение прямоугольной формы направляется в одну обмотку, а инвентированный сигнал — в другую. Поскольку обмотки включены навстречу друг другу, то при рабочем’ цикле в 50% никакого движения не будет. Изменение этого соотношения застит заслонку двигаться в ту или другую сторону.
Шаговые моторы
Шаговые моторы все в большей степени становятся популярны в качестве приводных механизмов в автомобилях и многих других случаях. Эго объясняется той легкостью, с которой они могут
управляться электрическими системами. Шаговые моторы делятся на три группы:
¦ моторы с изменяемым магнитным сопротивлением;
¦ моторы с постоянными магнитами;
¦ моторы гибридного типа.
На рис. 2.74 проиллюстрирован принцип действия шаговых электромоторов каждой из перечисленных групп. Кратко описан основной принцип их функционирования. Моторы с изменяемым
магнитным сопротивлением используют принцип максимального магнитного потока. Несколько обмоток устанавливается по окружности зубчатого статора. Ротор также имеет зубчатый профиль и изготавливается из магнитопроницаемого материала. Замелим, что в этом примере ротор имеет на два зуба меньше статора. Когда ток поступает на пару обмоток одной фазы, ротор повернется и установит два зубца так, чтобы обеспечить максимальный магнитный поток. Теперь, чтобы привести
в движение ротор, остается просто подавать напряжение
на обмотки в соответствующей последовательности. Например, если возбуждается фаза 4, мотор сделает один «шаг» по часовой стрелке. Если возбуждается фаза 2, то шаг будет против часовой
стрелки.
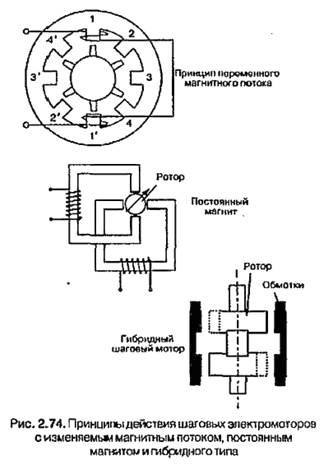
Эти моторы не обеспечивают большой крутящий момент и не дают никакого крутящего момента в отсутствии возбуждения. Однако они могут работать на относительно высоких частотах.
Углы поворота за один шаг обычно составляют 15°, 7,5°, 1,8°, или 0,45°.
Шаговые моторы с постоянным магнитом имеют значительно больший пусковой момент, а также обладают удерживающим моментом при снятии возбуждения. В данном случае ротор является постоянным магнитом. Для мотора с изменяемым магнитным сопротивлением направление тока в обмотках не имеет знамения, однако для мотора с постоянным магнитом направление тока важно. Моторы с постоянным магнитом имеют шаг угла поворота 45°, 18°, 15° и 7,5°. Вследствие большего крутящего момента и свойства удерживания моторы с постоянным магнитом становятся псе более и более популярными. По этой причине данный тип мотора далее будет рассмотрен более подробно.
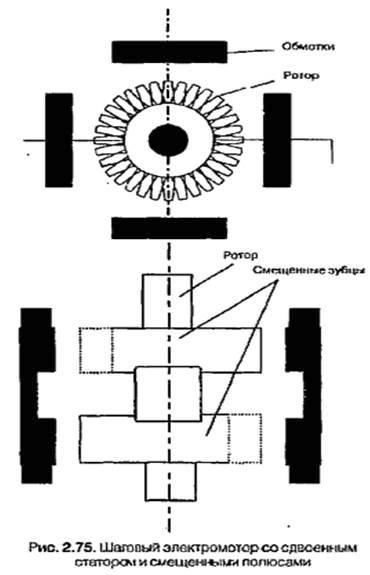
Гибридный шаговый мотор, показанный на рис. 2.75, является, как предполагает его название, комбинацией двух предыдущих типов моторов, Эти моторы были разработаны в попытке объединить высокую скорость и хорошую разрешающую способность по углу поворота с лучшими свойствами по крутящему моменту. Пара зубчатых колес располагается на обеих сторонах ротора-магнита. Зубцы на «северном» и «южном»
колесах сдвинуты друг относительно друга на половину шага. Это объединяет преимущества двигателя с изменяемым магнитным сопротивлением с высоким крутящим моментом двигателей с постоянным магнитом. Угловой шаг поворота таких моторов очень мал: 1,8°, 0,75° или 0,36°.
Описанные типы электродвигателей применялись и применяются в различных системах автомобиля. Диапазон этих применений лежит от приборов управления холостым ходом и дроссельной заслонкой карбюратора до привода указателя скорости
движения.
Давайте рассмотрим более детально функционирование и конструкцию шагового мотора с постоянным магнитом. Наиболее общая конструкция этого типа мотора включает два двойных статора, смешанных вокруг полюса на один угловой шаг. Ротор обычно изготовлен в форме кольцевого магнита из феррита бария методом спекания. Поскольку обмотки, показанные на рис. 2.76,
будут возбуждены и одном направлении раньше, чем в другом, мотор повернется на шаг в 90°. Шаг угла поворота т это просто 360°, деленное на число полюсов статора. Половинные шаги могут быть получены выключением обмоток прежде, чем возбуждение
будет реверсировано. Это заставит ротор выстраиваться относительно оставшихся полюсов и совершить поворот на половину шага в 45°.
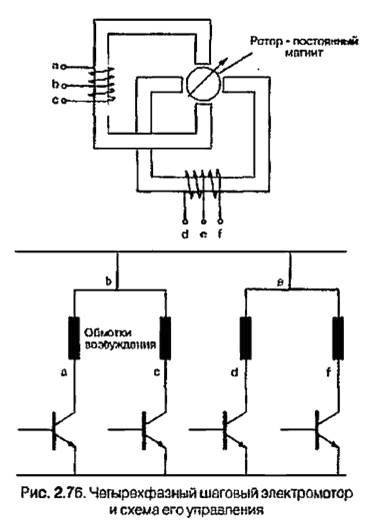
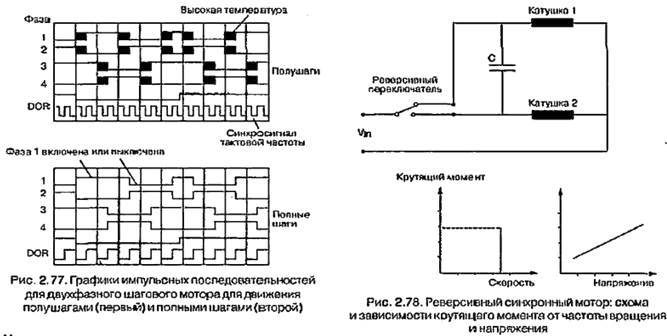
Направление вращения определяется порядком , в котором обмотки включаются, выключаются или реверсируются. На рис. 2.76 показан четырехфазный шаговый мотор и схема его управления.
Графики импульсных последовательностей для двухфазных шаговых моторов показаны на рис. 2.77. Первый график —для полных шагов, второй график —для выполнения половинных шагов.
Основное преимущество шагового мотора заключается
в том, что здесь не требуется обратной связи по положению, потому что мотор может быть «привязан» к известной начальной точке, и тогда определенное число шагов переместит ротор в любое
требуемое мое положение.
Вычисления, необходимые для пошаговых перемещений,
приведены ниже:
где ?—шаг угла поворота, п —число оборотов в
минуту, w- угловая скорость, f —частота шагов,
я- число шагов за оборот.
Синхронные электромоторы
Синхронные электромоторы используются в том
случае, когда требуется привод, вращение которого должно быть синхронизировано во времени. Такие моторы всегда вращаются с постоянной скоростью, которая определяется частотой системы и
числом полюсных пар в моторе:
п = ( f * 60)/р,
где n- число оборотов в минуту, f- частота синхронизации,
р — число полюсных пар.
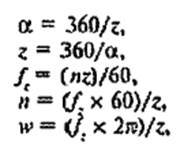
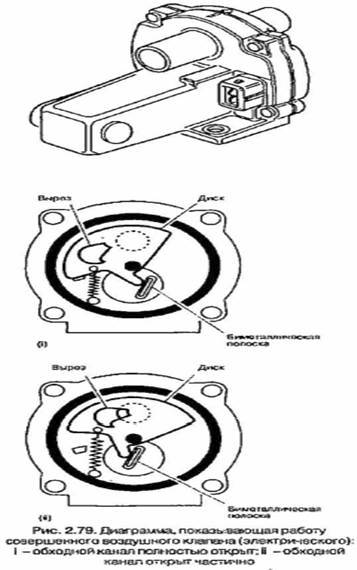
На рис. 2.78 показан реверсируемый синхронный
мотор и схема его управления вместе с характеристиками
крутящего момента в зависимости
от частоты вращения. Частота вращения такого мотора
постоянна и ограничена максимальным крутящим
моментом. Максимальный крутящий момент
определяется источником напряжения питания.
Термоприводы
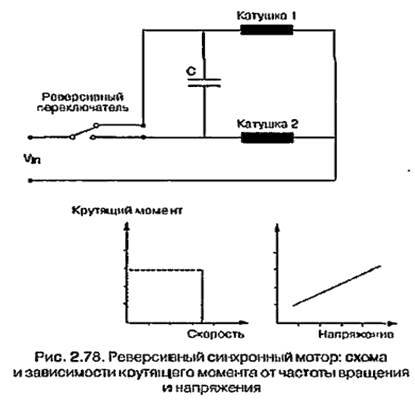
Примером термопривода является движение традиционного указателя уровня топлива или стрелки температурного датчика (см. гл. 13). Следующий пример — воздушный прибор, применяемый на многих ранних системах впрыска топлива (рис. 2.79). Когда ток полается па клеммы прибора, нагревательный
элемент заставляет изгибаться биметаллическую пластинку, и она закрывает клапан.
Главное преимущество такого тина привода, помимо его простоты, заключается в том, что, если поместить его в подходящее место, время реакции будет зависеть от температуры окружающей среды. Этот прибор идеально подходит для таких случаев,
как управление запуском двигателя из холодного состояния, а коша двигатель запущен и разогрет, никакого действии от привала не требуется.
Новые разработки
Развитие электроники, особенно цифровой электроники, происходит так стремительно, что трудно уел слить за всеми новинками. Я попытался в этой главе изложить лишь основы цифровой электроники, потому что детальное изложение заняло бы
слишком большой объем книги. Многие из автомобильных систем стали сегодня «компьютеризированными», и здесь освещены только те аспекты цифровой техники, которые наиболее бурно развиваются. К тому же существует тенденция ко все большей интеграции и связям между системами. Это позволяет встроенной аппаратуре диагностики, а также системам контроля качества гарантировать соблюдение требований законодательства в
области экологии. Несомненно, что движение в направлении к более широкой диагностике в автомобиле (on-board diagnostics — OBD) будет продолжаться.
Постепенно становятся доступными ряд новейших типов датчиков. Датчики с эффектом Холла используются вместо индуктивных датчиков для измерения скорости вращения двигателя и скорости вращения колее. Два их главных преимущества состоят в том, что измерение становится возможным
на более низких оборотах (вплоть до нулевой скорости) и выходное напряжение датчиков становится независимым от скорости вращения. На рис. 2.80 показан датчик с эффектом Холла., попользованный для контроля скорости вращения
колеса.
Появился интересный датчик, используемый для контроля качества масла. Этот тип датчиков от компании Kavlico Corporation (рис. 2.81) и Bosch (рис. 2.82} работает по принципу контроля изменения диэлектрической постоянной масла. Диэлектрическая
постоянная увеличивается по мере того, как растет доля антиокисляющих присадок (антиоксидантов) в масле. Диэлектрическая постоянная также растет, если охлаждающая жидкость загрязняет масло.
Контроль детонации в бензиновых двигателях начали использовать с середины 1980-х для того, чтобы улучшить качественные показатели, уменьшить вредные выбросы и увеличить экономию топлива. Эти датчики дают хороший «плоский» отклик в диапазоне частот от 2 до 20 кГц.

Дизельный датчик детонации, показанный на рис. 2.83 работает
в диапазоне от 7 до 20 кГц. При помощи соответствующей электронной аппаратуры двигатель может работать в режиме, близком к границе детонации топлива (detonation border line- DBL). Это улучшает экономические и экологические показатели
двигателя.
Одной из разработок в технологии приводных механизмов является электрический вращающийся клапан для рециркуляции выхлопного газа (electric exhaust gas rccirculution —C E C R ) для использования в дизельных двигателях (компания Lucas Varily).
Этот прибор показан на рис. 2.84. Основные требования для этого клапана касаются способности к самоочистке, точного управления газовым потоком и скорости реакции.
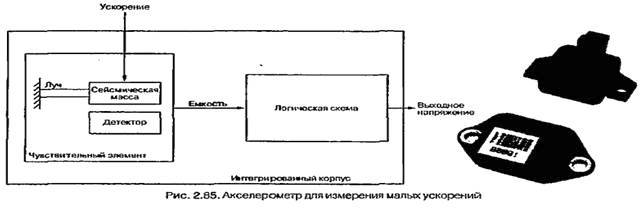
Акселерометр для измерения малых ускорений представлен в варианте компании Texas Instruments. Датчик, показанный на рис. 2.85, может быть сконструирован для функционирования в диапазоне ускорений от 0,4 до 10 g. Этот тип датчика используется
для системы круиз-контроля, системы антиблокироюки колеc (ABS) b предохранительных систем безопасности (safety restraint systems — SRS).

Диагностика – электронные компоненты, датчики и приводы
Введение
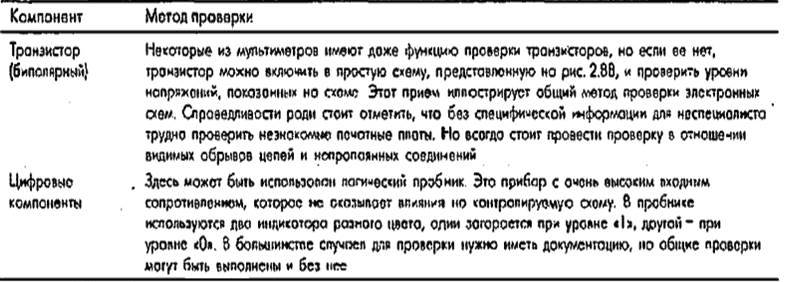
Индивидуальные электронные компоненты могут быть проверены несколькими способами, но цифровой мультиметр—это наилучший прибор. В табл. 2.3 представлен ряд методов проверки
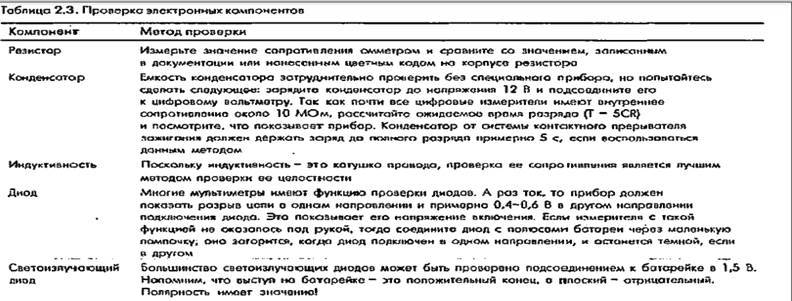 отдельных компонентов, извлеченных из схемы.
отдельных компонентов, извлеченных из схемы.
Тестирование датчиков
Тестирование датчиков для диагностики их неисправностей
обычно сгодится к измерению их выходных сигналов. В некоторых случаях датчик будет создаешь такой сигнал сам по себе (индуктивный датчик, например). В других случаях будет необходимо полагать на прибор необходимое напряжение,
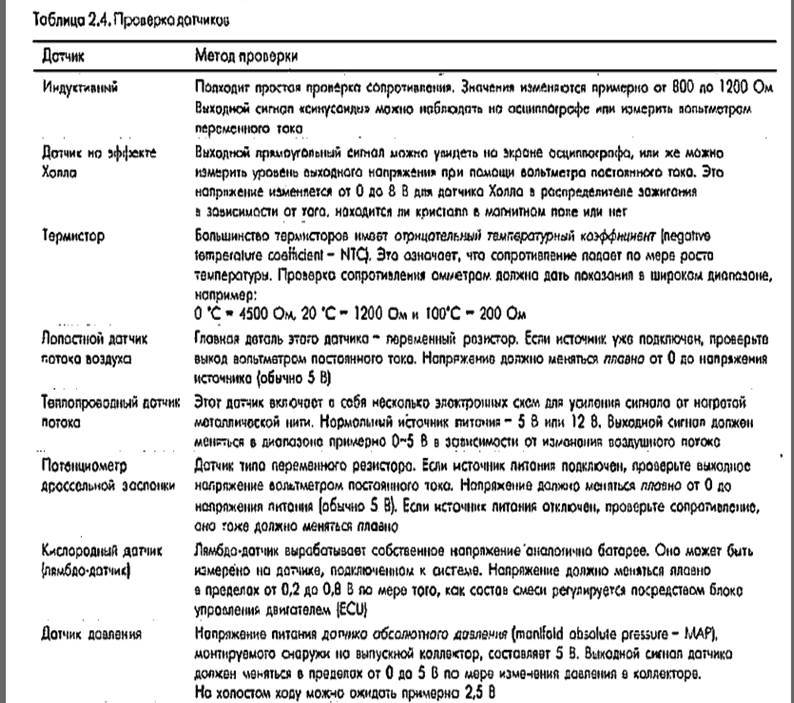 чтобы заставить его работать (датчик Холла, например). В этом случае, прежде чем приступить к тестированию датчика, будет не липшим проверить, что на схему в автомобиле поступает напряжение питания. В табл. 2.4 приведен список некоторых датчиков общего назначения вместе с предлагаемыми методами проверки (в предположении подачи номинального напряжение питания). Схема тестирования транзистора приведена на рис. 2.86.
чтобы заставить его работать (датчик Холла, например). В этом случае, прежде чем приступить к тестированию датчика, будет не липшим проверить, что на схему в автомобиле поступает напряжение питания. В табл. 2.4 приведен список некоторых датчиков общего назначения вместе с предлагаемыми методами проверки (в предположении подачи номинального напряжение питания). Схема тестирования транзистора приведена на рис. 2.86.
Статьи к прочтению:
- Дать описание и назначение окон обозревателей «процессор», «память», «текст программы», «программа».
- Давайте беречь наших детей все вместе!
ДУЭЛЬ БЕЗ ОГРАНИЧЕНИЙ: Chevrolet Camaro vs ВАЗ-2110 РПД
Похожие статьи:
-
Тепловой датчик воздушного потока
Особое преимущество теплового датчика заключается в том, что он измеряет массовый расход воздуха. Принцип его действия таков: коша воздух проходит вблизи…
-
Динамическое повышение приоритета
Планировщик принимает решения на основе текущего приоритета потока, который может быть выше базового. Есть несколько ситуаций, когда имеет смысл повысить…