
Оснащенного датчиком освещенности
Цель занятия: создать виртуальный прибор-программу в среде LabVIEW, предназначенную для управления мобильным роботом LEGO Mindstorms, движущимся при помощи датчика освещённости по линии на полу.
 Данная задача является классической для всех курсов программирования мобильных роботов (робокаров). Такие роботы являются участниками многих соревнований, в которых изменяется лишь геометрическая форма линии (трассы), а побеждает робот, затративший минимальное время на прохождение заданной дистанции.
Данная задача является классической для всех курсов программирования мобильных роботов (робокаров). Такие роботы являются участниками многих соревнований, в которых изменяется лишь геометрическая форма линии (трассы), а побеждает робот, затративший минимальное время на прохождение заданной дистанции.
Постановка задачи. Поставленная задача является типовой задачей автоматического управления с помощью обратной связи и включает в себя следующие основные компоненты:
1)объект управления, или управляемая система – мобильный робот (то, чем мы хотим управлять);
2)цель управления (то, чего мы хотим достичь) – движение робота по линии;
3)измеряемые параметры (то, что мы можем измерять, «выходы») – освещенность поверхности, по которой движется робот;
4)управляющие параметры (то, что мы можем менять, чтобы воздействовать на объект управления, «входы») – мощность ;
5)регулятор – устройство, вырабатывающее управляющие («входные») параметры, необходимые для достижения заданной цели. Система, состоящая из объекта и регулятора, называется системой управления.
Регулируемая величина задачи – положение датчика освещенности на границе черного и белого, зависящее от уровня освещенности под ним.
Возмущающее воздействие – это движение робота вперед, которое приводит, в силу кривизны линии, к отклонению от границы, в результате чего, при отсутствии регулирующего воздействия, робот съедет с линии.
Таким образом, искомое решение задачи автоматического управления – это закон (алгоритм) управления, который обеспечивает достижение поставленной выше цели.
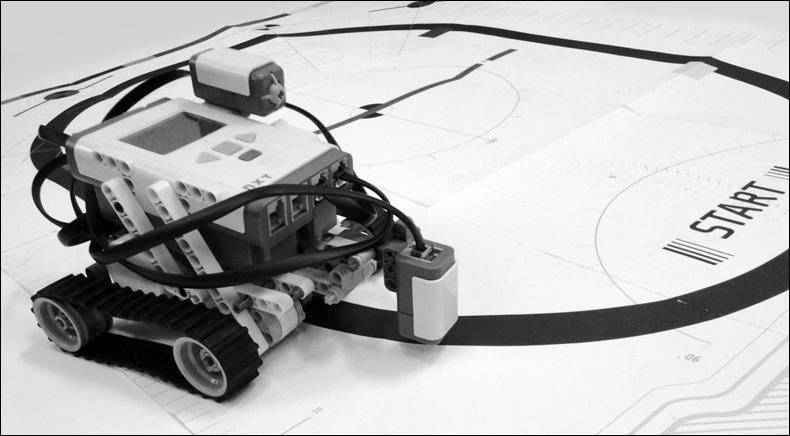
Идея и алгоритм программы. Для практического решения задачи будем использовать трёхколёсный LEGO-робот с двумя ведущими колесами, сервоприводы которых (исполнительные органы объекта управления) подключены к портам А и С микрокомпьютера NXT (А – для правого колеса, С – для левого).
Управляющая программа должна обеспечивать движение этого робота по плоской поверхности вдоль границы черного и белого цвета, используя показания одного датчика освещенности.
Закон (алгоритм) управления движением робота по линии представим в виде следующих формул для изменения мощности  сервоприводов А и С робота на основе измерительной информации от его датчика освещённости:
сервоприводов А и С робота на основе измерительной информации от его датчика освещённости:
 ;
;
 ,
,
где  – текущее показание датчика освещённости;
– текущее показание датчика освещённости;
 – среднее значение мощности сервопривода при движении по границе линии при уровне освещенности
– среднее значение мощности сервопривода при движении по границе линии при уровне освещенности  (
(  при
при 
 2 – среднее арифметическое значение освещенности между освещенностью над черной линией и белым фоном («серый цвет»);
2 – среднее арифметическое значение освещенности между освещенностью над черной линией и белым фоном («серый цвет»);
 и
и  – значение мощности сервопривода А и С соответственно;
– значение мощности сервопривода А и С соответственно;
 – коэффициент усиления регулятора, позволяющий изменять реакцию сервопривода на изменение освещенности.
– коэффициент усиления регулятора, позволяющий изменять реакцию сервопривода на изменение освещенности.
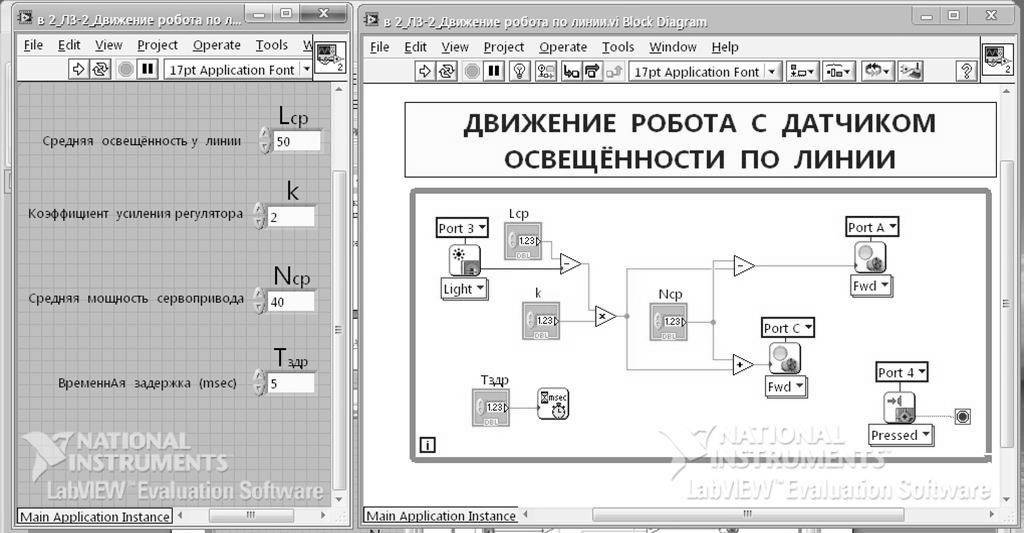
Программа управления движением робота с использованием циклаWhile в данном случае имеет следующий вид (см. на следующей странице).
Примечания.
1.Перед запуском программы необходимо провести настройку («калибровку») регулятора – замерить с помощью датчика освещенности  и
и  , вычислить величину и задать её на фронтальной (лицевой) панели виртуального прибора.
, вычислить величину и задать её на фронтальной (лицевой) панели виртуального прибора.
2.Датчик должен быть расположен в передней части робота на расстоянии 5…10 мм от пола, а на старте находиться на границе линии (см. рисунок).
3.Для выключения (остановки) робота предусмотрен датчик касания (датчик нажатия), подключенный к порту 3 робота.
4.При значительном изменении уровня освещенности в ходе лабораторного занятия (например, из-за перемещения облаков или туч по небу) процесс настройки регулятора необходимо повторить.
5.Для минимизации отклонения траектории движения робота от линии необходимо оптимизировать соотношение между величинами средней мощности  сервопривода (скоростью робота) и коэффициента усиления регулятора.
сервопривода (скоростью робота) и коэффициента усиления регулятора.
6.Рассмотренные конструкция робота (с одним датчиком освещённости) и алгоритм управления движением робота не работают в случае движения по линии с перекрёстками. В этом случае на робот требуется установить два дптчика освещённости, расставленных на расстояние в две-три ширины линии.
7.Для отработки отклика робота в программу включена временная задержка Тздр в цикле (в миллисекундах); для начала можно принять Тздр = 5 мс .

Статьи к прочтению:
Светильник светодиодный с датчиком движения NAVIGATOR
Похожие статьи:
-
Внешний видмобильного робота LEGO Mindstormsс датчикамикасания Цель занятия: создать виртуальный прибор-программу в среде LabVIEW, использующую вложенные…
-
Датчики динамического позиционирования автомобиля
Эти датчики применяются для систем активной подвески, управления устойчивостью и других систем общего назначения, в которых учитывается движение…