
Управляющее устройство мп. мпс под управлением первичного автомата
Лекция 4
4.1. Управляющее устройство МП. МПС под управлением первичного автомата
4.2. Работа первичного управляющего автомата в режиме прерывания
4.3. Работа первичного управляющего автомата в режиме захвата шин
Управляющее устройство МП. МПС под управлением первичного автомата
Граф состояний устройства управления, а также описание управляющих сигналов МП и слова состояния требуют более детального рассмотрения.
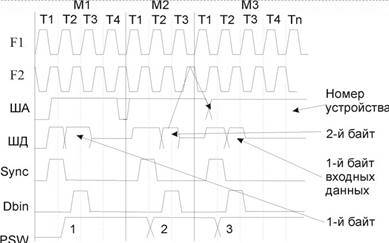
Рис. 1.10. Временная диаграмма выполнения команды ВВОД

Рис. 1.11. Временная диаграмма основного цикла команды
Временная диаграмма (рис. 1.10) представляет собой основной цикл команды МП в условиях, когда присутствует внешний управляющий сигнал READY, информирующий о готовности периферийного устройства к обмену с МП (воздействие сигналов HOLD и INT будет рассмотрено ниже).
В первом такте синхронизации Т1 МП выставляет на шине адреса адрес очередной команды. Начинается цикл выборки команды. Одновременно на линии синхронизации SYNC появляется единичный сигнал, который, вопервых, идентифицирует информацию на шине данных как слово состояния и загружает его во внешний регистр состояния (SL), а во-вторых, свидетельствует о начале машинного цикла. По окончании сигнала синхронизации буферная схема шины данных переводит ШД в режим ввода, о чем свидетельствует сигнал DBIN на шине управления (рис. 1.11).
В такте Т2 МП осуществляет проверку готовности внешнего устройства к обмену в том случае, если адаптер внешнего устройства или памяти генерирует сигнал Ready. Первичный автомат управления переходит в состояние ожидания Wait (Tw). В состоянии Tw МП будет находиться до тех пор, пока на линии управления Ready не появится единичный сигнал, который будет свидетельствовать о том, что память или периферийное устройство готовы к обмену. Естественно, что до тех пор, пока автомат находится в состоянии Tw, МП простаивает. Поэтому на этапе проектирования МПС следует обеспечить согласование рабочей частоты МП и типа используемой памяти. Из альтернативных состояний T2 и Tw первичный автомат всегда переходит в состояние Т3, в котором происходит чтение или запись данных в память. Состояния первичного автомата Т4 и Т5 отводятся для реализации операции, заданной кодом команды. Выполнение некоторых сложных команд может требовать от первичного автомата неоднократного перехода по циклу состояний от Т1 до Т5 (см. рис. 1.10). Цикл команды ввода реализуется за три машинных цикла: М1, М2, М3. В течение машинного цикла М1 производится выборка команды. После загрузки команды в регистр команды первичный автомат по коду команды определяет, что данная команда ввода/вывода двухбайтовая. Включается механизм тандемных пересылок, который влечет за собой переход первичного автомата из машинного цикла М1 к М2, т. е. из состояния Т4 автомат вновь переходит в состояние Т1. В машинном цикле М2 второй байт команды из памяти считывается по шине данных по сигналу разрешения ввода DBIN. Второй байт команды определяет номер внешнего устройства ввода, от которого следует получить байт входных данных. В машинном цикле М2 на шине адреса присутствует инкрементированное значение содержимого счетчика команд. В состоянии Т1 третьего машинного цикла М3 первичный автомат выставляет на шине адреса номер устройства ввода, который был представ-лен во втором байте команды. Под воздействием сигнала DBIN с линии управления и сигналов управления ВУ с регистра состояния выбранное устройство ввода выдает на шину данных байт данных, который загружается в аккумулятор МП. В начале каждого машинного цикла на регистре состояний процессора фиксируется слово состояния PSW.
Статьи к прочтению:
Настройка звука в менеджере VIA HD Audio Deck by LuckyMaverick (29*Lucky)
Похожие статьи:
-
Рхитектура мп. функции устройства управления.
4.Система команд МП 1.В основу построения МПС-систем положено три принципа: ? магистральности; ? модульности; ? микропрограммного управления. Принцип…
-
Управляющее устройство, системы команд и типы команд.
Процессор. Центральным блоком, занимающимся обработкой информации в компьютере, является процессор. Он выполняет операции над данными — операндами….