
Элементы обработки и интерпретации георадарных данных
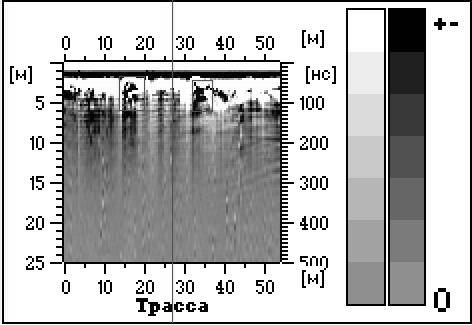
В результате измерений полученные данные в каждой точке складываются в волновую картину (радарограмму) представляющую собой ансамбль записей сигналов, пришедших к приемной антенне в интервал времени от 0 – момента посылки зондирующего импульса, до конца интервала записи. Горизонтальная ось радарограммы — ось профиля в метрах. Вертикальная ось радарограммы – ось времени с началом t = 0 – моментом посылки зондирующего импульса и концом t=tmax , соответствующим концу интервала записи. Амплитуды сигналов на радарограмме кодируются цветом, соответствующим выбранной палитре в меню настроек.
Анализируя радарограммы можно установить положение границ слоёв и других объектов в подповерхностных слоях, в чём и состоит смысл георадиолокационных исследований.
Анализ георадарных данных можно условно разделить на три части: определение и визуализация слоев во временном разрезе, определение истиной глубины слоев (построение глубинного разреза) и определение геометрии подповерхностных аномалий на плане исследуемого участка по системе полученных профилей.
Производить обработку и интерпретацию данных позволяют программы Grot12 (используется на начальном этапе съемки данных, экспресс-анализе получаемых результатов и работы с отдельными профилями) и система обработки «Грот-проект».
1. Определение и визуализация слоев во временном разрезе.
В процессе съемки комплекс фиксирует поступающие на приемник отраженные сигналы, которые визуализируются на экране, согласуясь с их амплитудами, полярностью и временами задержек.
Как уже было сказано выше, для обработки полноволновых форм вместо амплитудной координаты используется цветовая градация амплитуды сигнала. На цветных кадрах выделяются линии максимальной (положительной) и минимальной (отрицательной) амплитуды, и по этим линиям и по линиям смены полярности определяют линии синфазности сигнала, которым и соответствуют подповерхностные объекты и слои.
В случае отражающей границы линия синфазности практически повторяет ее форму. В случае дифракции от локального объекта, например, трубопровода, линия синфазности имеет форму гиперболы, из-за достаточно широкой диаграммы направленности передающей и приемной антенны. Поэтому при движении по трассе отдельный локальный объект наблюдается не только в точке непосредственно над ним, но также на некотором удалении в обе стороны, причем величина этого удаления определяется угловой шириной диаграммы направленности антенн.
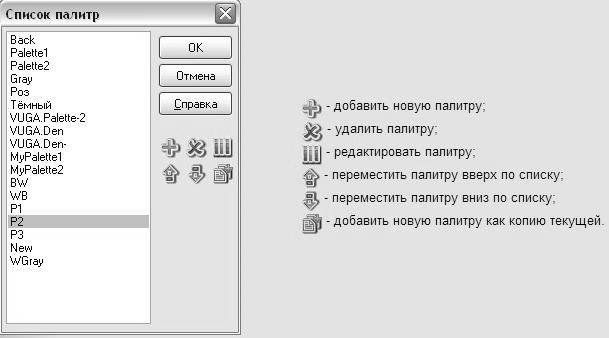
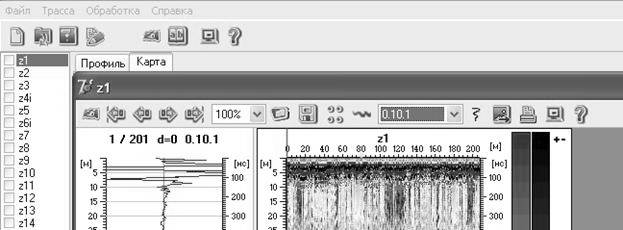
Для поиска и выделения линий синфазности используется набор цветовых палитр, цветами которых раскрашиваются изображения отраженных сигналов (кодируются амплитуды).
Можно использовать как стандартные палитры, так и создавать новые.
Работа с цветными палитрами в программах Grot12 и «Грот-проект» аналогичны. В дальнейшем будем рассматривать непосредственно работу в системе «Грот-проект».
Для работы с палитрами переходим в меню настроек с помощью кнопки  на панели.
на панели.

Нажав кнопку, можно редактировать и создавать палитры:
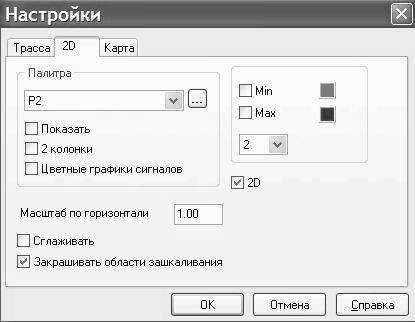
При редактировании используем следующий диалог:
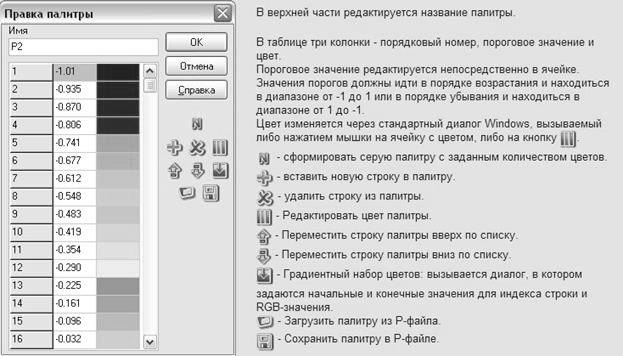
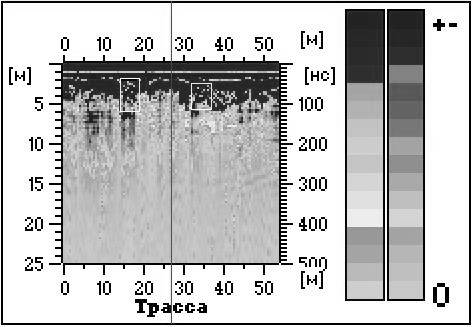
Использование разных палитр и их комбинаций как в процессе съемки, так и на этапе подробной обработки, позволяет наиболее точно определить линии синфазности подповерхностных объектов.
 .
. 

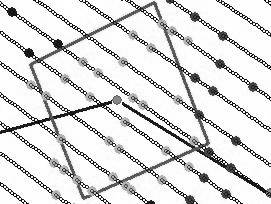
| Аномальные зоны на профилях, соответствующие скрытым вертикальным стенкам. |
Для более тонкой настройки выбранной палитры при помощи клавиш F3 и F4 вы можете двигать вертикальное положение нуля для сигналов с целью лучшей визуализации профиля (особенно когда кривая сигнала отклоняется от среднего положения, например, при высокой влажности почвы).
- Определение истиной глубины слоев (построение глубинного разреза).
Метод профилирования не позволяет однозначно определить ни одного параметра среды без дополнительных предположений или без привлечения дополнительных данных.
При измерениях мы вводим в настройках некий усредненный параметр диэлектрической проницаемости EPS, характерный для грунтов конкретной местности. В соответствии с этим параметром программа пересчитывает временной разрез (разрез в масштабе времени задержки) в усредненный глубинный и выводит его на экран.
Для точного пересчета временного георадиолокационного разреза в глубинный, т.е. для трансформирования временной оси в пространственную, необходимо определить диэлектрическую проницаемость каждого слоя в отдельности. Для этого нужно использовать либо данные бурения, либо справочные материалы и базы данных по районам работ с близким геологическим строением, либо значения диэлектрической проницаемости EPS, полученные по годографам дифрагированных волн (метод зондирования). Годограф — это функция задержки сигнала от слоя (объекта) в зависимости от расстояния между приемной и передающей антеннами при симметричном разносе их в разные стороны. Если есть гарантия, что в окрестности точки зондирования отражающие границы плоскопараллельны, то возможно упростить процедуру съемки – оставить приемник на месте, а относить только передатчик (или наоборот).
Метод зондирования — самый информативный метод георадарной съемки. Для плоскослоистой среды этот метод позволяет определять все параметры среды: мощности и глубины залегания слоев, их диэлектрическую проницаемость и проводимость.
Процесс получения информации при зондировании технически аналогичен процессу профилирования. Только вместо шага по профилю с неизменным расстоянием между антеннами, происходит разнос антенн друг от друга с заданным шагом годографа.
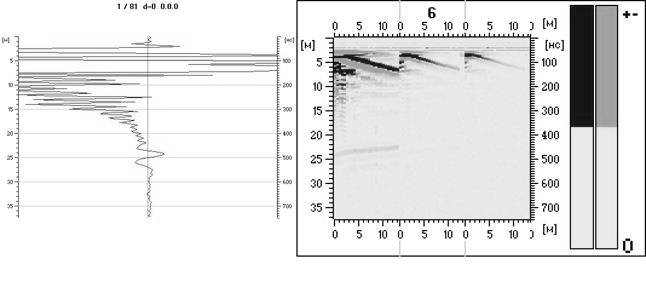
Рис. Волновая форма сигнала и радарограмма годографа при трех ослаблениях сигнала(0,20,30 дБ)
Полученные таким образом данные обрабатываются в диалоге годографа, вызываемого нажатием кнопки  .
.
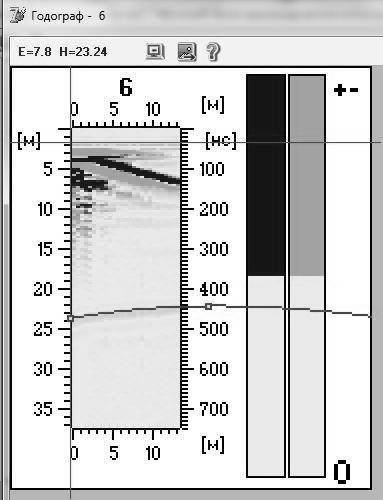
Диалог годографа с примером определения расстояния до выработки в соляной шахте (?).
Кнопкой мыши устанавливаются квадратные маркеры так, чтобы они располагались на кривой годографа, при этом на верхней панели отображаются вычисленные значения электромагнитной проницаемости и глубины (в метрах). Предполагается, что первое измерение было произведено на некотором начальном расстоянии между антеннами, а потом расстояние увеличивается с некоторым шагом. Начальный шаг годографа и шаг по трассе задаются.
Процедура построения слоев разреза реализована в процедуре STRATABOUNDS программы GROT.
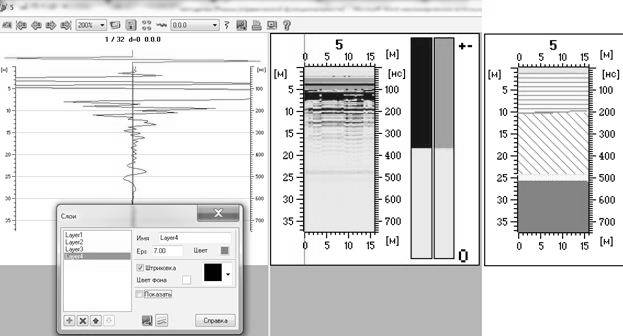
Схема построения разреза при известных значениях диэлектрической проницаемости слоев по границам на радарограмме.
Таким образом, наиболее оптимальный по затратам времени способ проведения георадарной съемки заключается в первоначальном профилировании трассы и определении точек зондирования. Эти точки выбираются на плоскослоистых участках трассы. Если относительно выбранного участка на остальной трассе не появляются новые слои, то достаточно одного пункта зондирования. Полученные при зондировании данные служат далее дополнительными данными для профилирования, позволяющими решить обратную задачу георадиолокации на всей трассе профилирования.
Определение геометрии подповерхностных аномалий на плане исследуемого участка.
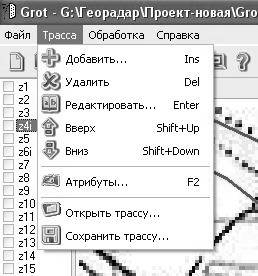
В процессе работы программы управления георадаром «Grot12» пользователь получает данные, сгруппированные в трассы. Средствами этой программы результаты измерений по трассам можно дополнительно структурировать – обрезать, сохранять окончание, склеивать, менять направление ( кнопки  ,
,  ,
,  ,
,  ), и в дальнейшем использовать эти материалы для обработки внешними программами, используя экспорт данных (кнопка
), и в дальнейшем использовать эти материалы для обработки внешними программами, используя экспорт данных (кнопка  ). При составлении отчетов можно воспользоваться кнопкой
). При составлении отчетов можно воспользоваться кнопкой  , для выбора образа копирования (график сигнала или двухмерный (обычно цветной) профиль в правой части окна) и направления вывода (буфер обмена или файл).
, для выбора образа копирования (график сигнала или двухмерный (обычно цветной) профиль в правой части окна) и направления вывода (буфер обмена или файл).
Для того, чтобы определить подповерхностные объекты и структуру слоев, как правило, недостаточно анализа глубинного разреза по одной трассе.
Рассмотрим некоторые возможности программы «GROT» для реализации задачи анализа данных по системе профилей, как в разрезе, так и в плане исследуемого участка.
1) При работе на конкретном участке создаётся проект, включающий данные, полученные из георадара и всю сопутствующую информацию (параметры измерений, координаты точек и т.п.). Проекты хранятся в файлах с расширением grot.
Данные, измеряемые вдоль некоторой траектории движения, образуют трассы и могут быть сохранены в файлах с расширением track. Также поддерживаются файлы форматов line, получаемых программой GrotData (для георадаров ГРОТ-10 и ГРОТ-11) и программой Grot12 (для георадаров ГРОТ-12).
Проект формируется путем выбора трасс из набора¸ пройденного на участке съемки, с помощью кнопок выпадающего меню на панели:
2) Процедура получения изображения системы профилей в рабочем окне программы.
С помощью переключения режимов «Профиль» / «Карта» можно переходить из области работы с отдельным профилем, к просмотру системы профилей на плане.
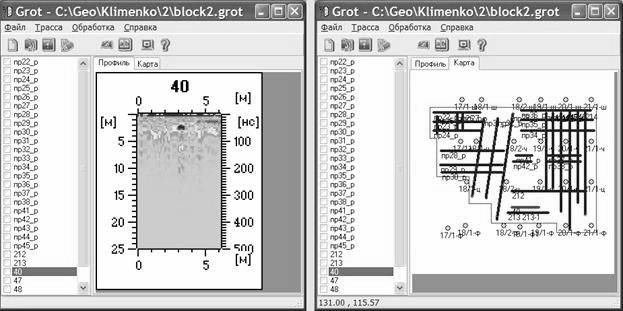
Профиль — содержит двумерный образ текущей трассы в текущей цветной палитре (установленной в диалоге настроек).
Карта — отображается план местности и расположение на ней трасс.
Для того чтобы система профилей отразилась в окне программы, необходимо согласовать координаты трасс с координатами рабочей области программы.
Нажав кнопку  — «свойства проекта», заполняем меню «Карта».
— «свойства проекта», заполняем меню «Карта».
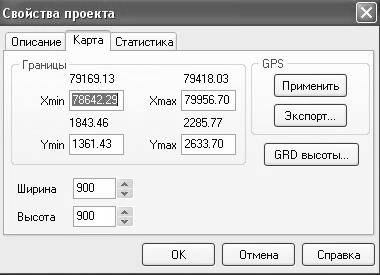
Эта страница содержит параметры карты.
Группа Границы содержит четыре поля для минимальных и максимальных значений координат карты. Сверху над этими полями в качестве подсказки показаны минимальные и максимальные значения координат в соответствии с координатами точек всех трасс проекта.
Поля Ширина и Высота задают размер образа карты в пикселях.
Группа GPS содержит две кнопки:
Применить — для всех точек всех трасс проекта вытаскиваются значения координат X, Y, H. Затем устанавливаются границы карты как минимальные и максимальные значения координат X и Y с небольшими полями вокруг.
Экспорт — экспорт GPS координат в GPX-файл для программы MapSource.
Кнопка GRD высоты предназначена для задания высот из GRD-файла, созданного программой Surfer.
GRD файл содержит поверхность с равномерной сеткой по X и Y и значениями высот в узлах этой сетки. Для каждой точки каждой трассы по координатам X и Y вычисляется высота. Таким образом, в программе Surfer может быть построен рельеф местности для последующего автоматического нанесения высот в точках трасс.
Переходим к диалогу координат точек по каждой трассе.
Для этого можно воспользоваться кнопкой  , или два раза щелкнуть левой кнопкой «мыши» на любой трассе из списка.
, или два раза щелкнуть левой кнопкой «мыши» на любой трассе из списка.
Используя кнопку  , переходим к диалогу координат точек.
, переходим к диалогу координат точек.
Диалог содержит редактируемые поля значений координат X, Y и H для текущей точки.


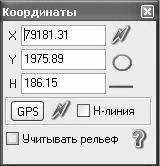
Кнопка GPS присваивает высоты H из GPS-координаты для всех точек трассы. Кнопка  производит коррекцию высот H в соответствии с проведённой H-полилинией. Высоты корректируются таким образом, чтобы профиль на полилинии стал на одном горизонтальном уровне. При этом профиль показывается с учётом рельефа.
производит коррекцию высот H в соответствии с проведённой H-полилинией. Высоты корректируются таким образом, чтобы профиль на полилинии стал на одном горизонтальном уровне. При этом профиль показывается с учётом рельефа.
Поле H-линия включает показ полилинии, которую можно при помощи мыши редактировать. Новые точки полилинии добавляются при нажатии Ctrl во время щелчка мыши на профиле. При включении этого режима высоты точек восстанавливаются из GPS-координат и профиль показывается с учётом рельефа.

3) Выделение аномальных зон в разрезе и на плане.
Любой подповерхностный объект отражается на радарограмме в виде некоторой области (называемой нами «аномальной»), имеющей свои характерные особенности. Эти особенности можно выделить графически, используя процедуру разметки.
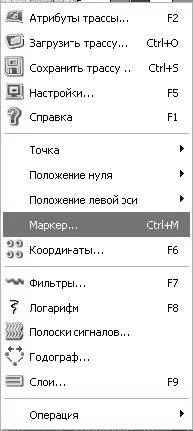
Вызвав левым щелчком «мыши» выпадающее меню, получаем возможность пометить необходимый нам участок с помощью цветных маркеров.
 |

Расположение различных меток на всей системе профилей может дать представление о структуре аномальных зон не только по глубине, но и в плане измеряемого участка.
4) Использование графической подложки для системы профилей.
Для привязки результатов съемки к конкретному участку можно использовать как схемы, составленные в процессе работ, так и различные графические подложки (карты, планы местности и т.п.). Эти подложки можно «включить» в режиме «карта», щелкнув правой кнопкой «мыши» «Параметры карты». При этом в папке подготовленного проекта необходимо подготовить файлы, содержащие информацию об этих подложках (или других графических элементах, которые можно обозначать на подготовленной в графике системе профилей).


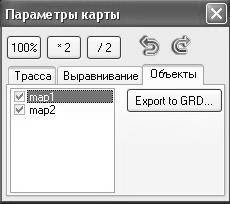
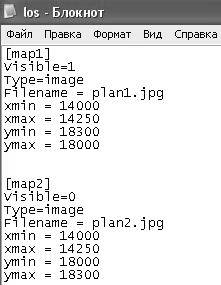
Прежде всего, готовим файл с расширением «.jpeg», содержащий саму графическую подложку. Далее, заполняем (с помощью стандартной программы «Блокнот») ключевые параметры в текстовом файле с расширением «.grotmap» и именем, идентичным имени сформированного проекта.
Внимание! Все эти файлы должны находиться в одной директории!



Следует обратить внимание, что при перемещении курсора по полю в режиме «Карта», в нижнем левом углу высвечиваются текущие координаты точки.
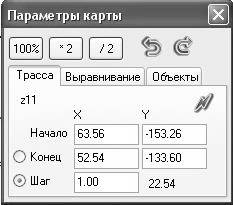
Размещать и корректировать положение трасс на схеме можно в режиме «Трасса» в параметрах карты. Нажав клавишу «Shift», правой кнопкой мыши проводится видимая прямая линии. С ее помощью измеряется расстояние между точками на схеме и наносятся профили.
Если активируем параметр «Шаг» и проводим линию, то трасса размещается в направлении этой линии соответственно заданному шагу в параметрах трассы. Если выбираем параметр «Конец» и проводим линию, то этим задаем начало и конец трассы, и в этом случае шаг пересчитывается заново автоматически, не зависимо от заданного в настройках.


Трехмерная визуализация осуществляется с использованием дополнительных программ трехмерной графики Tecplot,Voxler c помощью интерфейса программы GROT.
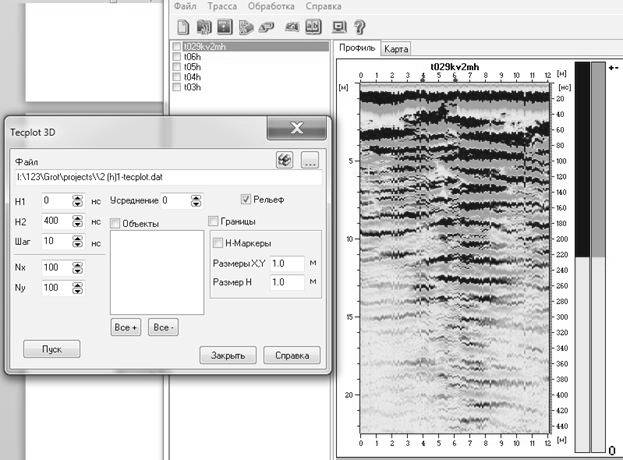
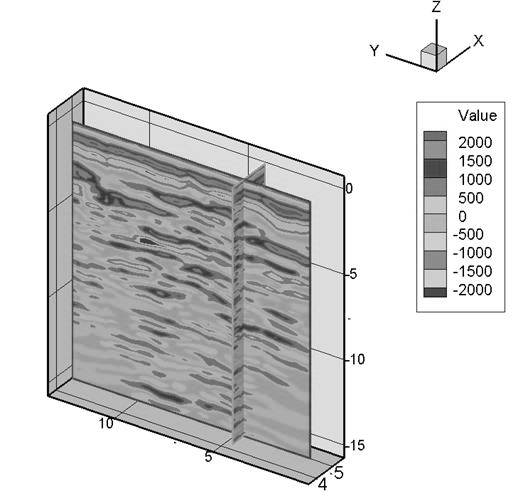
После просчета с заданными параметрами получаем 3D визуализацию
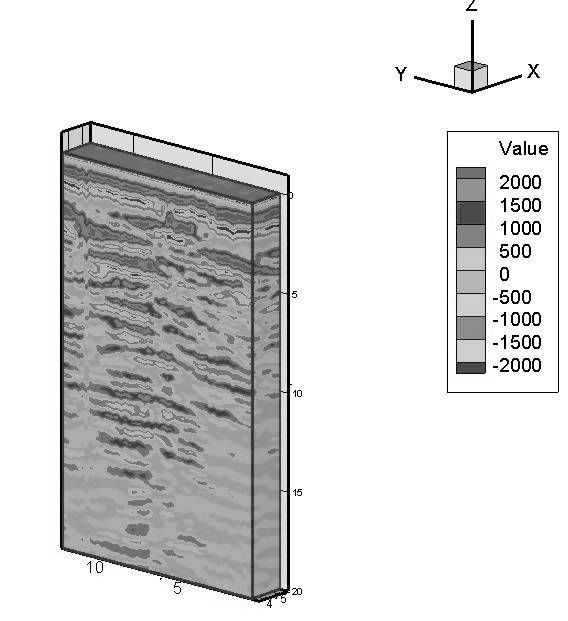
С помощью интерфейса программ 3d визуализации можно проводить подробное исследование подповерхностных слоев участка съемки
Этап №5
Статьи к прочтению:
Георадар. Георадарная съемка. Пример обработки, интерпретации и построения 3D модели
Похожие статьи:
-
Распределенная обработка данных.
Распределенная обработка данных — обработка данных, проводимая в распределенной системе, при которой каждый из технологических или функциональных узлов…
-
Второй этап обработки данных мтз
Выполнение данной практической задачи начинается со второго этапа обработки данных МТЗ. Целью этого этапа является построение гладкой кривой,…