
Проблемы выполнения сети связи процессоров в кластерной системе
Лекция №19
PVP-архитектура и кластерная архитектура
План
1.PVP-архитектура.
2.Кластерная архитектура.
3.Проблемы выполнения сети связи процессоров в кластерной системе.
PVP-архитектура
PVP (Parallel Vector Process) – параллельная архитектура с векторными процессорами. Основным признаком PVP-систем является наличие специальных векторно-конвейерных процессоров, в которых предусмотрены команды однотипной обработки векторов независимых данных, эффективно выполняющиеся на конвейерных функциональных устройствах. Как правило, несколько таких процессоров (1-16) работают одновременно с общей памятью (аналогично SMP) в рамках многопроцессорных конфигураций. Несколько узлов могут быть объединены с помощью коммутатора (аналогично MPP). Поскольку передача данных в векторном формате осуществляется намного быстрее, чем в скалярном (максимальная скорость может составлять 64 Гбайт/с, что на 2 порядка быстрее, чем в скалярных машинах), то проблема взаимодействия между потоками данных при распараллеливании становится несущественной. И то, что плохо распараллеливается на скалярных машинах, хорошо распараллеливается на векторных. Таким образом, системы PVP-архитектуры могут являться машинами общего назначения (general purpose systems). Однако, поскольку векторные процессоры весьма дорого стоят, эти машины не могут быть общедоступными.
Наиболее популярны три машины PVP-архитектуры:
1) CRAY X1, SMP-архитектура. Пиковая производительность системы в стандартной конфигурации может составлять десятки терафлопс.
2) NEC SX-6, NUMA-архитектура. Пиковая производительность системы может достигать 8 Тфлопс, производительность одного процессора составляет 9,6 Гфлопс. Система масштабируется с единым образом операционной системы до 512 процессоров.
3) Fujitsu-VPP5000 (vector parallel processing), MPP-архитектура. Производительность одного процессора составляет 9.6 Гфлопс, пиковая производительность системы может достигать 1249 Гфлопс, максимальная емкость памяти – 8 Тбайт. Система масштабируется до 512 процессоров.
Парадигма программирования на PVP-системах предусматривает векторизацию циклов (для достижения разумной производительности одного процессора) и их распараллеливание (для одновременной загрузки нескольких процессоров одним приложением).
На практике рекомендуется выполнять следующие процедуры:
— производить векторизацию вручную, чтобы перевести задачу в матричную форму. При этом, в соответствии с длиной вектора, размеры матрицы должны быть кратны 128 или 256;
— работать с векторами в виртуальном пространстве, разлагая искомую функцию в ряд и оставляя число членов ряда, кратное 128 или 256.
За счет большой физической памяти (доли терабайта) даже плохо векторизуемые задачи на PVP-системах решаются быстрее на машинах со скалярными процессорами.
Кластерная архитектура
Кластер представляет собой два или более компьютеров (часто называемых узлами), объединяемые при помощи сетевых технологий на базе шинной архитектуры или коммутатора и предстающие перед пользователями в качестве единого информационно-вычислительного ресурса. В качестве узлов кластера могут быть выбраны серверы, рабочие станции и даже обычные персональные компьютеры. Узел характеризуется тем, что на нем работает единственная копия операционной системы. Преимущество кластеризации для повышения работоспособности становится очевидным в случае сбоя какого-либо узла: при этом другой узел кластера может взять на себя нагрузку неисправного узла, и пользователи не заметят прерывания в доступе. Возможности масштабируемости кластеров позволяют многократно увеличивать производительность приложений для большего числа пользователей технологий (Fast/Gigabit Ethernet, Myrinet) на базе шинной архитектуры или коммутатора. Такие суперкомпьютерные системы являются самыми дешевыми, поскольку собираются на базе стандартных комплектующих элементов (off the shelf), процессоров, коммутаторов, дисков и внешних устройств.
Кластеризация может осуществляться на разных уровнях компьютерной системы, включая аппаратное обеспечение, операционные системы, программы-утилиты, системы управления и приложения. Чем больше уровней системы объединены кластерной технологией, тем выше надежность, масштабируемость и управляемость кластера.
Типы кластеров (предложены Я. Радаевским и Д. Эдлайном):
— Класс I. Класс машин строится целиком из стандартных деталей, которые продают многие поставщики компьютерных компонентов (низкие цены, простое обслуживание, аппаратные компоненты доступны из различных источников).
— Класс II. Система имеет эксклюзивные или не слишком широко распространенные детали. Таким образом, можно достичь очень хорошей производительности, но при более высокой стоимости.
Как уже отмечалось, кластеры могут существовать в различных конфигурациях. Наиболее распространенными типами кластеров являются:
— системы высокой надежности;
— системы для высокопроизводительных вычислений;
— многопоточные системы.
Отметим, что границы между этими типами кластеров до некоторой степени размыты, и кластер может иметь такие свойства или функции, которые выходят за рамки перечисленных типов. Более того, при конфигурировании большого кластера, используемого как система общего назначения, приходится выделять блоки, выполняющие все перечисленные функции.
Кластеры для высокопроизводительных вычислений предназначены для параллельных расчетов. Эти кластеры обычно собраны из большого числа компьютеров. Разработка таких кластеров является сложным процессом, требующим на каждом шаге согласования таких вопросов как инсталляция, эксплуатация и одновременное управление большим числом компьютеров, технические требования параллельного и высокопроизводительного доступа к одному и тому же системному файлу (или файлам) и межпроцессорная связь между узлами, и координация работы в параллельном режиме. Эти проблемы проще всего решаются при обеспечении единого образа операционной системы для всего кластера. Однако реализовать подобную схему удается далеко не всегда и обычно она применяется лишь для не слишком больших систем.
Многопоточные системы используются для обеспечения единого интерфейса к ряду ресурсов, которые могут со временем произвольно наращиваться (или сокращаться). Типичным примером может служить группа web-серверов.
В 1994 году Т. Стерлинг (Sterling) и Д. Беккер (Becker) создали 16-узловой кластер из процессоров Intel DX4, соединенных сетью 10 Мбит/с Ethernet с дублированием каналов. Они назвали его Beowulf по названию старинной эпической поэмы. Кластер возник в центре NASA Goddard Space Flight Center для поддержки необходимыми вычислительными ресурсами проекта Earth and Space Sciences. Проектно-конструкторские работы быстро превратились в то, что известно сейчас как проект Beowulf. Проект стал основой общего подхода к построению параллельных кластерных компьютеров, он описывает многопроцессорную архитектуру, которая может с успехом использоваться для параллельных вычислений. Beowulf-кластер, как правило, является системой, состоящей из одного серверного узла (который обычно называется головным), а также одного или нескольких подчиненных (вычислительных) узлов, соединенных посредством стандартной компьютерной сети. Система строится с использованием стандартных аппаратных компонентов, таких как ПК, запускаемые под Linux, стандартные сетевые адаптеры (например, Ethernet) и коммутаторы. Нет особого программного пакета, называемого Beowulf. Вместо этого имеется несколько кусков программного обеспечения, которые многие пользователи нашли пригодными для построения кластеров Beowulf. Beowulf использует такие программные продукты как операционная система Linux, системы передачи сообщений PVM, MPI, системы управления очередями заданий и другие стандартные продукты. Серверный узел контролирует весь кластер и обслуживает файлы, направляемые к клиентским узлам.
Проблемы выполнения сети связи процессоров в кластерной системе
Архитектура кластерной системы (способ соединения процессоров друг с другом) в большей степени определяет ее производительность, чем тип используемых в ней процессоров. Критическим параметром, влияющим на величину производительности такой системы, является расстояние между процессорами. Так, соединив вместе 10 персональных компьютеров, мы получим систему для проведения высокопроизводительных вычислений. Проблема, однако, будет состоять в поиске наиболее эффективного способа соединения стандартных средств друг с другом, поскольку при увеличении производительности каждого процессора в 10 раз производительность системы в целом в 10 раз не увеличится.
Рассмотрим для примера задачу построения симметричной 16-процессорной системы, в которой все процессоры были бы равноправны. Наиболее естественным представляется соединение в виде плоской решетки, где внешние концы используются для подсоединения внешних устройств (рис.1).
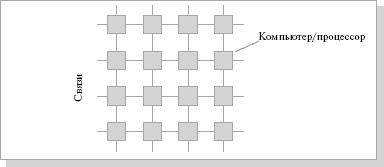
Рисунок 1 — Схема соединения процессоров в виде плоской решетки
При таком типе соединения максимальное расстояние между процессорами окажется равным 6 (количество связей между процессорами, отделяющих самый ближний процессор от самого дальнего). Теория же показывает, что если в системе максимальное расстояние между процессорами больше 4, то такая система не может работать эффективно. Поэтому при соединении 16 процессоров друг с другом плоская схема является нецелесообразной. Для получения более компактной конфигурации необходимо решить задачу о нахождении фигуры, имеющей максимальный объем при минимальной площади поверхности. В трехмерном пространстве таким свойством обладает шар. Но поскольку необходимо построить узловую систему, вместо шара приходится использовать куб (рис.2), если число процессоров равно 8) или гиперкуб (рис.3), если число процессоров больше 8. Размерность гиперкуба будет определяться в зависимости от числа процессоров, которые необходимо соединить. Так, для соединения 16 процессоров потребуется четырехмерный гиперкуб. Для его построения следует взять обычный трехмерный куб, сдвинуть в нужном направлении и, соединив вершины, получить гиперкуб размером 4.
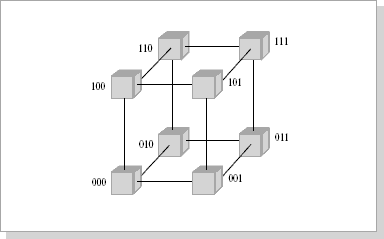
Рисунок 2 — Топология связи, 3-х мерный гиперкуб
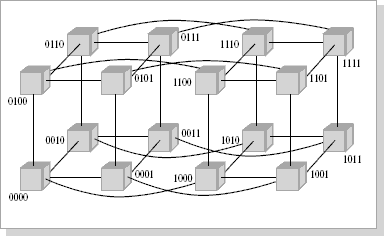
Рисунок 3 -Топология связи, 4-х мерный гиперкуб
Архитектура гиперкуба является второй по эффективности, но самой наглядной. Используются и другие топологии сетей связи: трехмерный тор, кольцо (рис.4), звезда и другие.
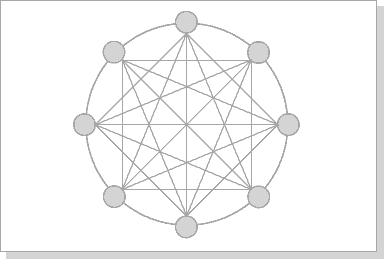
Рисунок 4 — Архитектура кольца с полной связью по хордам (Chordal Ring)
Наиболее эффективной является архитектура с топологией толстого дерева (fat-tree) (рис.5, 6). Архитектура fat-tree (hypertree) была предложена Лейзерсоном (C.E. Leiserson) в 1985 году. Процессоры локализованы в листьях дерева, в то время как внутренние узлы дерева скомпонованы во внутреннюю сеть. Поддеревья могут общаться между собой, не затрагивая более высоких уровней сети.
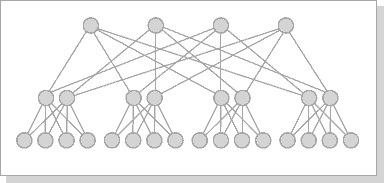
Рисунок 5 — Кластерная архитектура Fat-tree
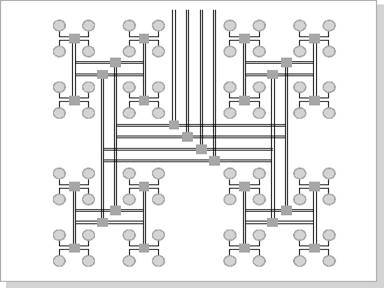
Рисунок 6 — Кластерная архитектура Fat-tree (вид сверху схему)
Поскольку способ соединения процессоров друг с другом больше влияет на производительность кластера, чем тип используемых в ней процессоров, то может оказаться более целесообразным создать систему из большего числа дешевых компьютеров, чем из меньшего числа дорогих. В кластерах, как правило, используются операционные системы, стандартные для рабочих станций, чаще всего свободно распространяемые (Linux, FreeBSD), вместе со специальными средствами поддержки параллельного программирования и балансировки нагрузки. При работе с кластерами, так же, как и с MPP-системами, используют так называемую Massive Passing Programming Paradigm – парадигму программирования с передачей данных (чаще всего – MPI). Умеренная цена подобных систем оборачивается большими накладными расходами на взаимодействие параллельных процессов между собой, что сильно сужает потенциальный класс решаемых задач.
Контрольные вопросы:
1. ОпишитеPVP-архитектуру, приведите три машины PVP-архитектуры.
2. Опишитекластерную архитектуру, назовите два класса кластеров.
3. Назовите проблемы выполнения сети связи процессоров в кластерной системе.
Литература:
1.Архитектуры и топологии многопроцессорных вычислительных систем /А.В. Богданов, В.В. Корхов, В.В. Мареев, Е.Н. Станкова/ — М.: ИНТУИТ.РУ «Интернет-Университет Информационных Технологий», 2004. — 176 с.
Статьи к прочтению:
Разведопрос: Владислав Механцев о производстве регистраторов в России и Китае
Похожие статьи:
-
Типы линий связи локальных сетей
Основные понятия Компьютерная сеть – совокупность программных и аппаратных средств и среды передачи, служащая для обмена информацией между участниками….
-
Информационные сети как класс открытых информационных систем.
Сеть — это взаимодействующая совокупность объектов, связанных друг с другом линиями. Основные характеристики сети, её структура и особенности…