
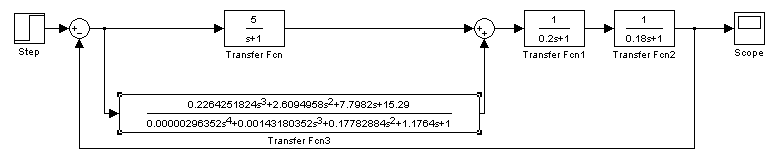
Промоделируем систему с последовательным корректирующим звеном

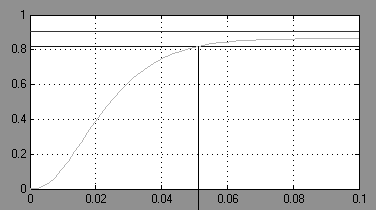
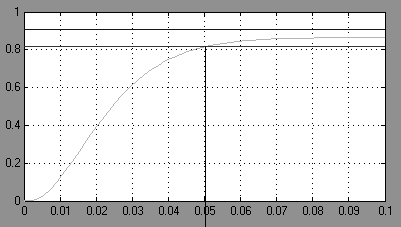
Определим основные показатели качества.

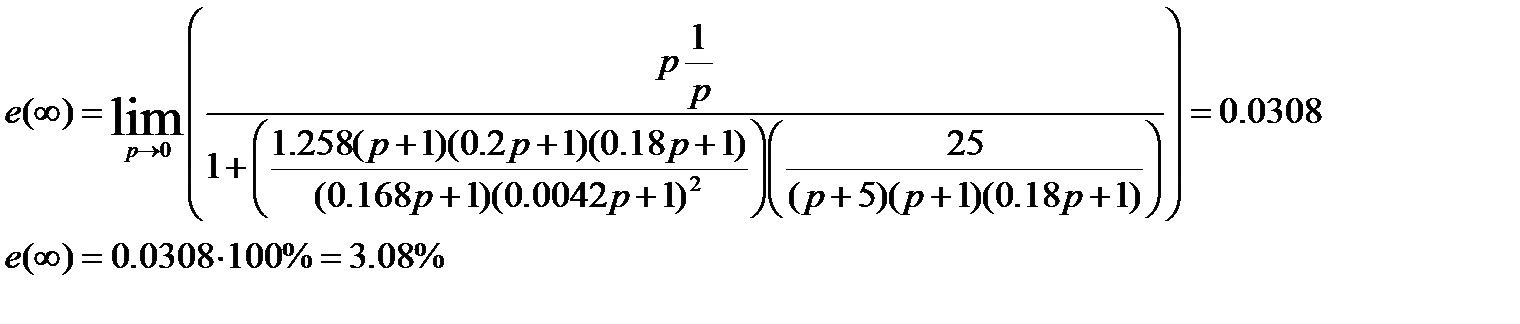
Все показатели качества удовлетворяет желаемым показателям.
Экспериментально проверим грубость системы, изменив параметры объекта (десятые доли параметра b).
Параметр b повышен на 0.3


На графике видно, что переходный процесс изменился, а так же и время переходного процесса, это значит, что система не грубая, тем самым она проще настраивает.
3. Провести синтез параллельного корректирующего устройства.
3.1. Построить ЛАЧХ охватываемой части системы Lох(w).

Наклон равен 0 Дб/дек
Проводим прямую с наклоном 0 Дб/дек до lg(  )=0. После строим прямую с наклоном -20 Дб/дек. Построение охватываемой ЛАЧХ смотреть в приложении.
)=0. После строим прямую с наклоном -20 Дб/дек. Построение охватываемой ЛАЧХ смотреть в приложении.
3.2. По виду Lисх(w), Lж(w) и Lох(w) построить ЛАЧХ параллельного корректирующего звена (звена местной обратной связи) Lпрк(w).
Lск(w)=Lжел(w)-Lнеохв(w)

Строим Lск(w):
Lск(w) пойдет с наклоном в 0 Дб/дек до точки  0,затем с наклоном +20 Дб/дек до точки
0,затем с наклоном +20 Дб/дек до точки  , затем с наклоном в +40 Дб/дек до точки
, затем с наклоном в +40 Дб/дек до точки  , затем с наклоном в +20 Дб/дек до точки
, затем с наклоном в +20 Дб/дек до точки  и далее с наклоном в -20 Дб/дек.
и далее с наклоном в -20 Дб/дек.
После того как Lск(w) построено — строим Lпрк(w)=Lск(w)-Lохв(w):
Учитываем К:

Lпрк(w) пойдет с наклоном в 0 Дб/дек до точки 0, затем с наклоном в +20 Дб/дек до точки  , затем с наклоном в +40 Дб/дек до точки
, затем с наклоном в +40 Дб/дек до точки  , затем с наклоном в +60 Дб/дек до точки
, затем с наклоном в +60 Дб/дек до точки  , затем с наклоном в +40 Дб/дек до точки
, затем с наклоном в +40 Дб/дек до точки  и далее с наклоном в 0 Дб/дек.
и далее с наклоном в 0 Дб/дек.
3.3. По виду Lпрк(w) определить передаточную функцию параллельного корректирующего звена Wпрк(w).

Определяем Wку(p):



Промоделировать систему с параллельным корректирующим звеном.

Определить основные показатели качества.


 0.046*100%=4.6%
0.046*100%=4.6%
Полученные показатели качества удовлетворяют желаемым.
3.6. Вычислить передаточную функцию параллельного корректирующего звена Wпрк(w), используя формулы эквивалентности.





Промоделировать систему с параллельным корректирующим звеном.
Определить основные показатели качества.


 0.046*100%=4.6%
0.046*100%=4.6%
Полученные показатели качества удовлетворяют желаемым.
4. Рассчитать модальный регулятор.
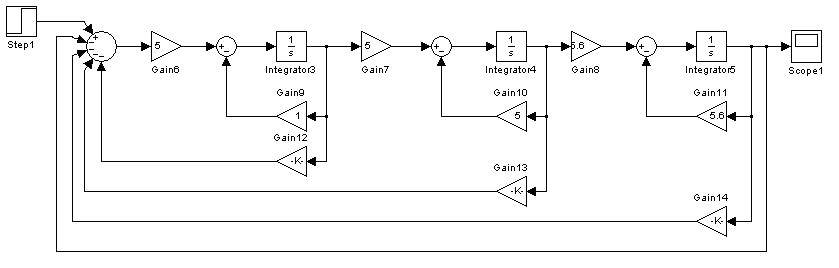
Построить схему переменных состояний исходной линейной системы.



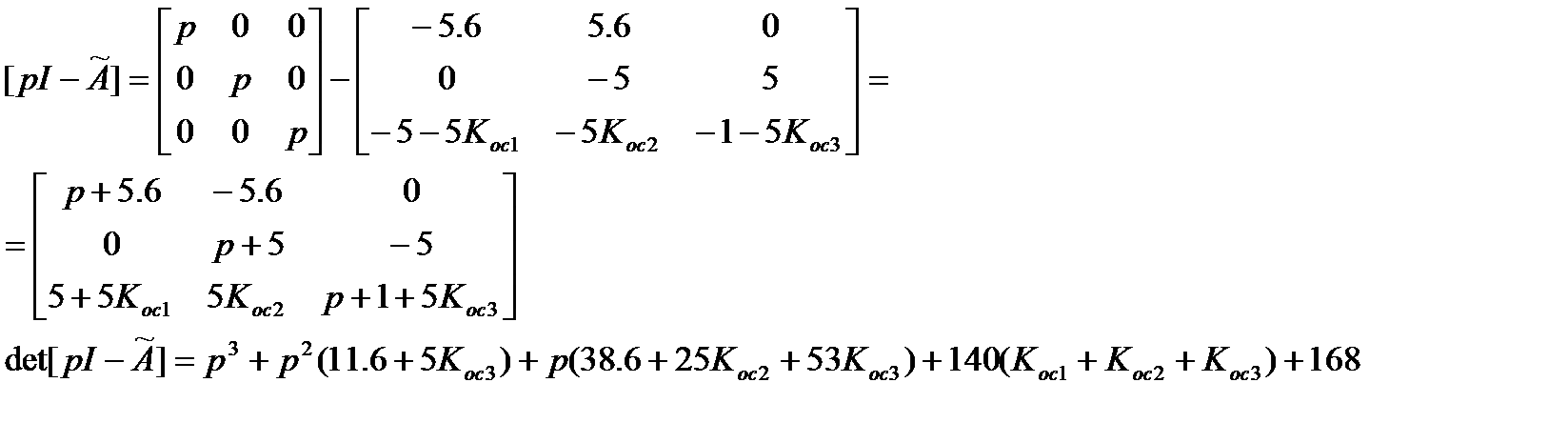
По СПС определить матрицы А и В. Проверить управляемость исходной системы.
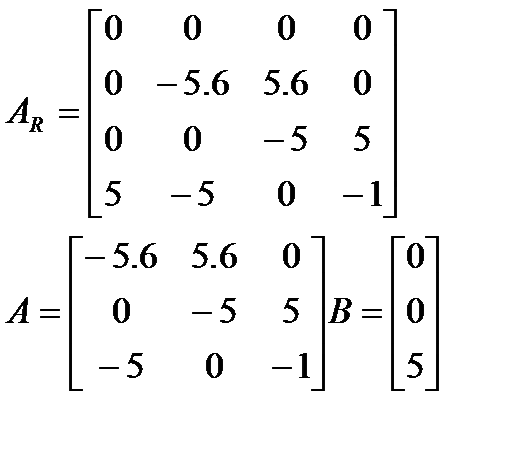


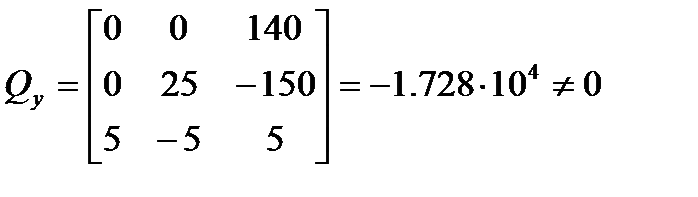
Система управляема, так как ранг матрицы равен 3 и равен порядку системы.
Рассчитать модальный регулятор для исходной системы.

Затем выбираем значение w0, оптимальное для нашей системы:

Выбрали желаемый полином той же степени что и система.

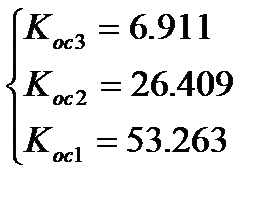
Все коэффициенты найдены.
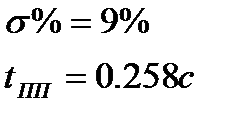
Промоделируем ПП системы с модальным регулятором на компьютере.

Определим основные показатели качества.
Статьи к прочтению:
Поиск кода разблокировки для Trojan-Ransom.Win32.PornoBlocker
Похожие статьи:
-
Системы автоматического аннотирования и реферирования текста
Реферат – связный текст, кратко выражающий не только центральную тему документа, но и цель, методы, основные результаты описанного исследования или…
-
Восстановление системы является важной возможностью Windows. Поэтому неудивительно, что запустить его можно множеством способов: в меню Пуск — Поиск…