
Инструкции по подключению ppm-sum приемника тут.
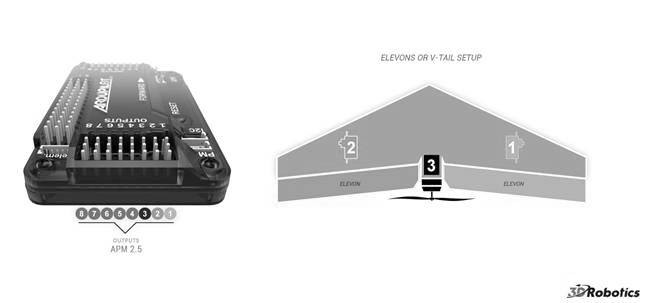
Примечание:элевоны (сочетание элерон/руль высоты, используемые в летающем крыле) также поддерживаются просто подключите их к первым двум каналам, точно так как это было подключено в RC приемник. Перед калибровкой радио укажите включить элевон-перемешивание в настройках Mission Planner, перезагрузите программу и плату и вернитесь к процедуре калибровки RC.
Если ваш аппарат имеет V-хвост, это в настоящее время не поддерживает APM на уровне программного обеспечения. Вместо этого, вы можете смешать ваши каналы крена и руля высоты при помощи внешнего аппаратного микшера. Вот хороший и очень недорогой ($ 3) за шт.
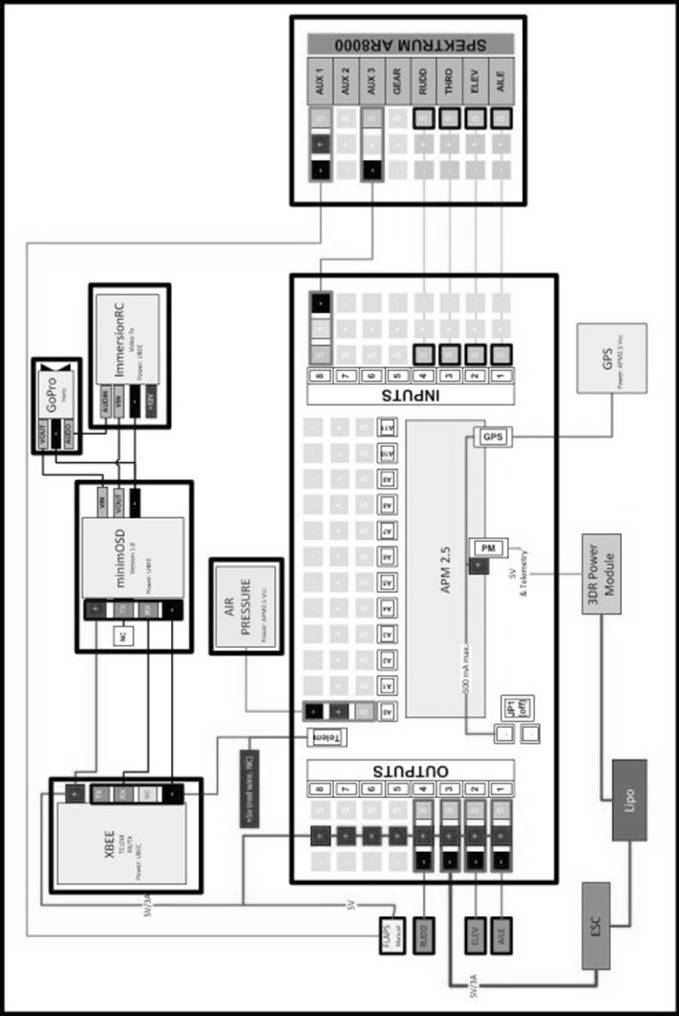
Выходы
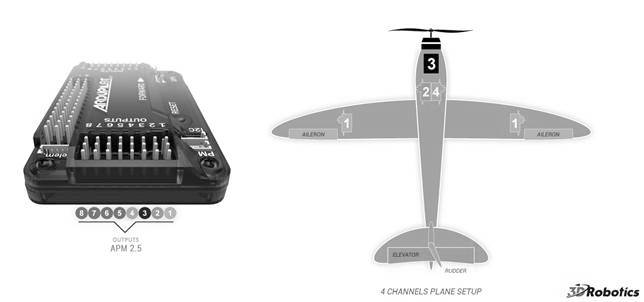
Подключите управление сервоприводами и другими устройствами, к APM в соответствующие выходные разъемы, как показано выше.
Четырехканальная конфигурация:
- 1. aileron — элероны
- 2. elevator — руль высоты
- 3. throttle — канал газа
- 4. rudder — руль направления
элевонная конфигурация: в англоязычной вики значится по состоянию на 10.04
- 1. starboard (right) elevon — правый элевон
- 2. port (left) elevon — левый элевон
- 3. throttle — канал газа
правильно так:
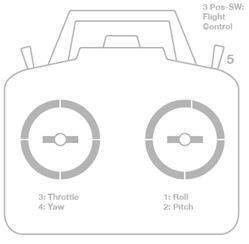
- 1. port (left) elevon — левый элевон (№1 на картинке )
- 2. starboard (right) elevon — правый элевон (№2 на картинке )
- 3. throttle — канал газа
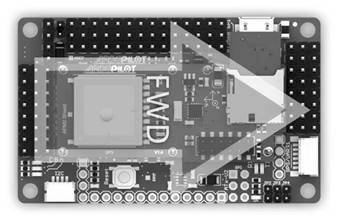
Установка контроллера в фюзеляж
Когда вы размещаете APM в самолете, очень важно убедиться, что его лицо смотрит в правильном направлении. Какие приметы: Разъемы GPS и приемника должны быть обращен вперед, а серво-кабели обращены назад.
(примечание: есть небольшая стрелка на нижней части платы, которая указывает вперед, на всякий случай)
Советы по монтажу
- При установке APM в самолете, важно, чтобы убедиться, что он надежно установлен и не сдвинется в полете. Он также должен быть как можно ближе к горизонтали, при положении самолета в своем летном положении. В идеале, его разместить как можно ближе к центру тяжести, на демпфирующую вибрации платформу.
- на автопилоте установлен барометрический датчик, это означает что вентиляционные отверстия должны обеспечивать атмосферное давление внутри кабины при любом возможном обдуве
- на автопилоте установлен компас, это значит что силовые провода должны быть как можно дальше от контроллера (как минимум 10-15см) постоянный ток большой величины создает магнитное поле, влияющее на компас.
GPS модуль
- Антенна GPS модуля должна быть ориентирована строго вверх
- Место для установки следует выбрать GPS максимально далеко от радиопередающего оборудования (например, телеметрии и видео передатчиков и ESC).
- В идеале, модуль GPS не должен быть прикрыт нечем от неба. Самая верхняя точка самолета является хорошим выбором.
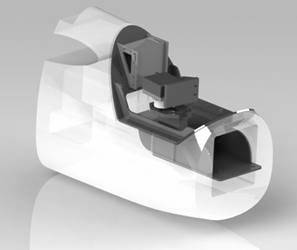
Вот пример того, как монтировать APM (и модуль GPS) в EasyStar с использованием шасси 3D Robotics Electronics, доступными с наклонно-поворотным узлом для монтажа камеры или без. Аналогичное шасси также доступно для HobbyKing Bixler
.
Шасси:

Первичная настройка APM
Мы рекомендуем использовать программу Mission Planner для первичной настройки APM. (Программа разработана для Windows, но будет работать в Windows VM на Mac OS или в Mono под Linux. Либо, если вы не хотите использовать ничего из перечисленного, задействуйте режим командной строки, который поддерживается в любой операционной системе.)
После того как вы скачали нужную прошивку, убедитесь что указаны правильные номер COM порта и скорость передачи (115k) и нажмите кнопку Connect в правом верхнем углу. Программа Mission Planner подключится через MAVLink.
(Если это первое использование вашего АРМ, сразу запустится форматирование флэш памяти, которое может помешать соединению через MAVLink и появлению сообщения о сбое подключения. В этом случае подождите пару минут и попробуйте подключиться снова.)
Теперь нажмите кнопку установки, выделенную красным на рисунке:
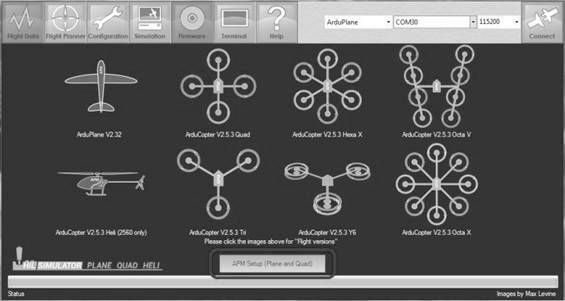
Откроется окно настройки конфигурации.
Шаги установки
1) Если у вас стандартная конструкция летательного аппарата, загрузите готовую конфигурацию
Для распространённых моделей самолётов, таких как Bixler, Skyfun and Skywalker, подготовлены конфигурационные файлы, которые учитывают особенности этих самолётов. Вы можете скачать их отсюда и использовать программу Mission Planner чтобы записать готовую конфигурацию в APM. Однако, вам всё ещё нужно проверить настройки с учетом оборудования, которое вы используете. Продолжайте выполнять следующие шаги.
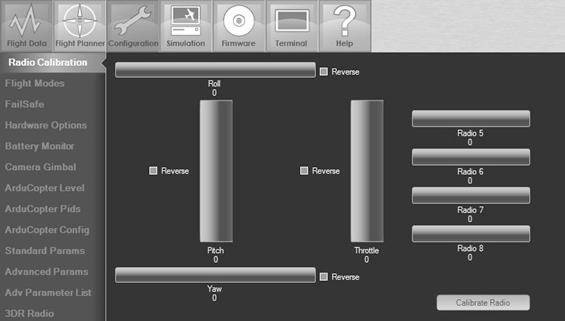
2) Откалибруйте входные сигналы вашего радио
Передатчик должен быть включен. Идеально, если вы уже облетали ваш самолет в ручном режиме и сделали необходимые регулировки, в этом случае выходные сигналы радио четко соответствуют настройкам самолёта; если вы ещё не летали на самолёте в ручном режиме и регулировки не выполнены, вам может понадобится повторная калибровка после того, как вы полетаете (перекалибровку легко сделать в поле).
Распределение каналов показано выше. Когда вы двигаете ручки передатчика, соответствующая полоска на экране также будет двигаться. Нажмите кнопку Calibrate Radio чтобы установить крайние положения уровней. Появятся красные полоски, и вы должны будете сдвинуть их в крайние положения. Проделать это необходимо для каждого используемого канала.
На этом же экране можно включить реверс сервомашинок, если необходимо, и установить режим элевонов.
Когда вы закончили нажмите кнопку Сохранить.
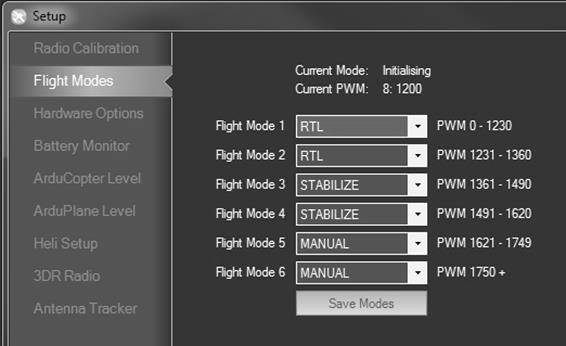
3) Установка полетных режимов
Вы можете выбирать разные полетные режимы находясь в полете, с помощью переключателя на радио передатчике, который должен быть подключен ко входу 8 APM. Полная информация о доступных полетных режимах здесь. (Если вам нужно иметь более трех режимов на вашем передатчике, инструкция здесь) Когда вы меняете положение переключателя, зеленая подсветка переходит на другие уровни. Используйте выпадающий список на каждом уровне, чтобы назначить этот режим на функцию. Заметьте, что режим 6 не может быть изменен и должен остаться Manual. Это аппаратный ручной режим, который означает, что он контролируется контуром failsafe платы APM, таким образом реализуется возможность вернутся к радио управлению в качестве меры безопасности.
4) Конфигурация оборудования
В этой вкладке вы можете указать плате APM какие опциональные сенсоры вы подключили. Просто включите флажок соответствующий сенсору, который вы используете. (В данный момент сонар не поддерживается APM; главным образом он используется для ArduCopter)
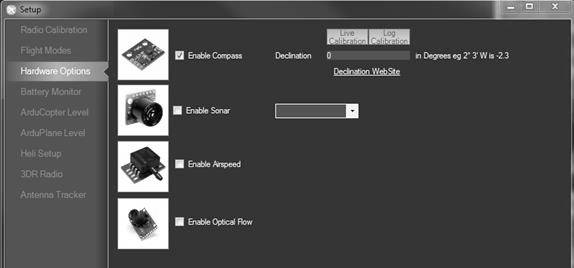
Для магнетометра (компаса), у вас есть выбор опции калибровки, когда вы его активируете:
1. Вы можете ничего не делать, и в этом случае управляющая программа попытается выяснить смещение и магнитное склонение, сравнивая показания компаса с данными GPS и IMU во время полета. Плюс: Не требует усилий. Минус: Потребуется несколько минут полета, чтобы компас начал работать правильно, поэтому в первый запуск компас работает ошибочно.
2. Ручная калибровка в программе Mission Planner (выше). Вы можете указать ваше магнитное склонение по инструкции ниже и затем нажать кнопку Live Calibration, затем перемещать и поворачивать ваш самолет 30 секунд пока запишутся данные и выполнятся некоторые математические операции для калибровки сенсора. Плюсы: Это работает. Минусы: это немного затруднительно, особенно для больших самолетов. Кроме того такая калибровка не учитывает магнитных помех, которые может вызывать мотор во время полета.
3. Воспроизвести лог полета. Это классная опция, показанная выше как Log Calibration, где вы можете просто воспроизвести предварительно сохраненный лог полета (.tlog) и управляющая программа сравнит данные GPS и IMU с данными компаса и сделает необходимые корректировки. Плюсы: Работает великолепно. Минусы: Вы должны уже были летать, и если вы загрузите файл .tlog где вы в действительности не летали, вы спутаете ваши калибровки и должны будете провести их снова, или рискуете получить плохие полетные характеристики.
Чтобы вручную ввести магнитное склонение для вашего географического местоположения, вы должны найти правильное значение, нажав на ссылку и открыв браузер. Выберите ваше положение и вы получите магнитное склонение, как выделено ниже:
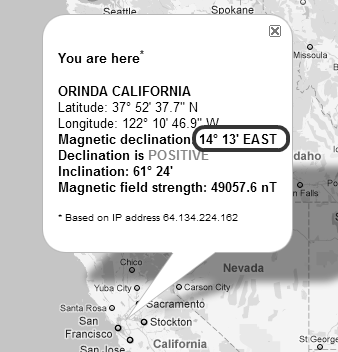
В этом случае в строку компаса необходимо ввести значение 14.13 (программа переконвертирует из десятичного числа в градусы/минуты).
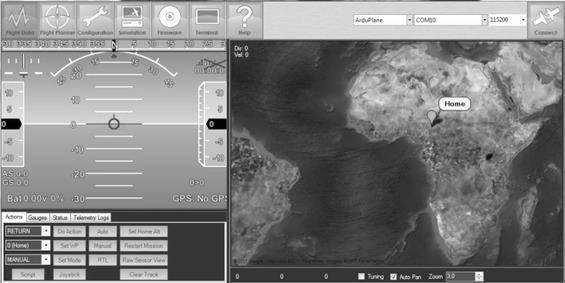
5) Сейчас если вы переключитесь во вкладку Flight Data с подключенным MAVLink, вы увидите искусственный горизонт двигающийся вместе с вашей платой. Помните что нужно оставить плату неподвижной на 15-20 секунд когда вы переключаетесь в эту вкладку, непосредственно после этого IMU должна выполнить первичную калибровку. Единожды это сделав, индикация (HUD) начнет работать.
Статьи к прочтению:
- Инструкция № 48 по пожарной безопасности в кабинете информатики
- Инструкция к велокомпьютеру m1wr и m1wl.
Seriously Pro F3 (SP3) Quick Tip — Install and setup PWM, CPPM and S-Bus Radio Receivers
Похожие статьи:
-
Инструкция smart baby watch: безопасность вашего ребенка 24 часа в сутки 7 дней в неделю.
Vk.com/bsw_torg Вход в систему: С чего начать? На обратной стороне коробочки, вы можете видеть, так называемый QR-код (штрих-код). Ниже дан пример, как…
-
Подключение библиотек подпрограмм 3 страница
Для понимания вероятностного подхода лучше всего рассмотреть несложный пример, связанный с бросанием правильной игральной кости, имеющей N граней…