
Суммарная погрешность преобразования и динамический диапазон системы
Исследование канала регистрации изображения
Работу выполнили:
студенты гр.4084/11:
Майоров А.А.
Когинов С.Ю.
Мелехин Г.А.
Горбунов Д.Н.
Работу проверил:
Доцент кафедры ИУС
Сараджишвили С.Э.
Задание
- Определить пространственную погрешность преобразования (неодинаковость преобразования отдельных пикселей);
- Определить временные шумы;
- Измерить неравномерность фона (темнового сигнала);
- Определить суммарную приведенную погрешность преобразования. Сделать вывод о динамическом диапазоне системы.
Пространственная погрешность
Определение пространственной погрешности состояло из нескольких этапов:
- Регистрация двух одинаковых кадров с помощью программы Logitech Webcam Software;
- Получение в Mathcad разностного кадра. Определение среднеквадратического отклонения пиксел в разностном кадре;
- Вывод в графическом окне зависимости амплитуды пикселов от номера для всех (трех) кадров.
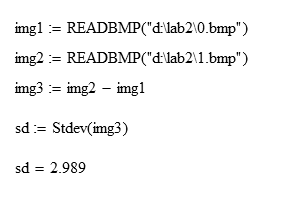
Программа считывания в Mathcad двух кадров, получения разностного изображения и нахождение среднеквадратического отклонения пикселов в разностном кадре:

Временные шумы
Определение временных шумов состояло из нескольких этапов:
- Регистрация с помощью программы Logitech Webcam Software 100 кадров;
- Определение в среде Mathcad среднеквадратического отклонения одного из пикселей во всех 100 кадрах.
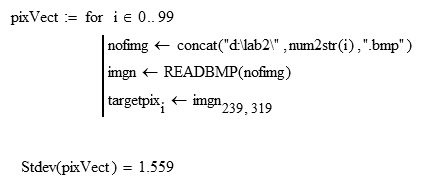
Посчитаем в цикле значения пиксела (239, 319) от каждого кадра.
Программа в Mathcad:
Неравномерность фона
Определение неравномерности фона состояло из следующих этапов:
- Закрыть зрачок камеры. Зарегистрировать кадр;
- Поставить перед камерой белый лист. Добиться его равномерной освещенности. Зарегистрировать еще один кадр;
- Определить неравномерность фона по координатам X и Y.
Полученные кадры:

Программа обработки в Mathcad:
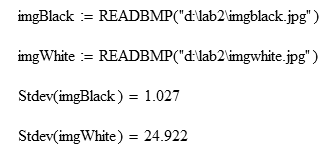
Кадр белого листа получился неравномерно освещенным, поэтому среднеквадратическое отклонение для второго кадра гораздо больше, чем для первого. При вычислении суммарной погрешности погрешность для изображения с белым фоном учитывать не будем.
Суммарная погрешность преобразования и динамический диапазон системы
На каждый пиксел полученного данной системой изображения влияет пространственная и временная погрешности, а так же неравномерность фона. Если сложить среднеквадратические отклонения по всем трем параметрам, то получим суммарную погрешность преобразования равную 2.989 + 1.559 + 1.027 = 5.575, примерно 6, при возможных значениях пиксела от 0 до 255. Следовательно, погрешность составляет примерно 2,4%.
На каждый пиксел получаемого из канала изображения приходится 8 бит информации (28 = 256), но суммарная погрешность составляет почти 2-3 бита, следовательно, на каждый пиксел остается только 5-6 бит.
Можно сделать вывод, что канал регистрации изображения выделяет не 256 уровней, а только 32-64 различных уровня.
Статьи к прочтению:
- Суперкомпютеры российской федерации
- Существуют разные методы создания защитных энергетических оболочек.
High End и Hi-Fi в фильме Ошибка аудиофила
Похожие статьи:
-
Динамическое преобразование адресов.
Этот способ заключается в том, что программа загружается в память в неизменном виде в виртуальных адресах, то есть операнды инструкций на адреса…
-
Система аналитических преобразований reduce
Развитие вычислительной техники начиналось с автоматизации выполнения арифметических действий. Вместе с тем известно, что компьютеры могут успешно…